 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShear-invariant Sliding Contact Perception with a Soft Tactile Sensor
May 02, 2019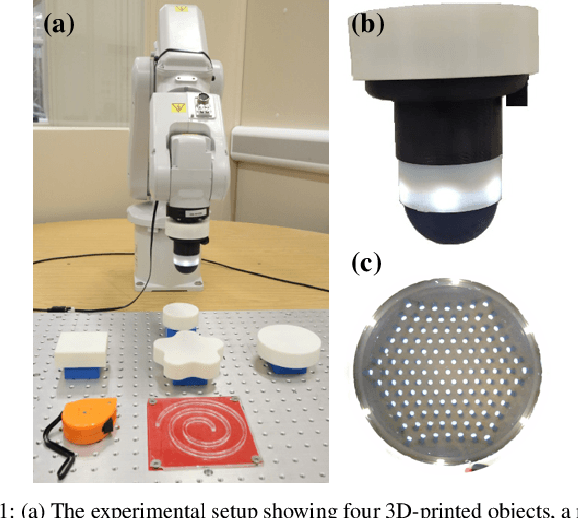
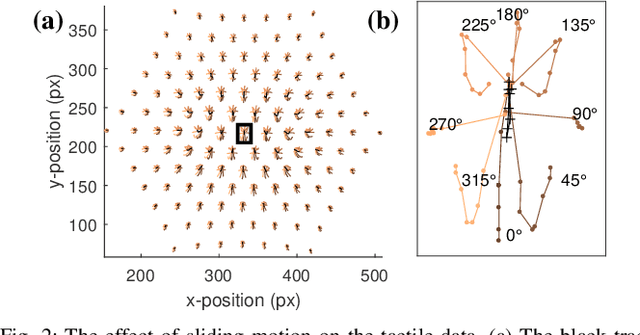
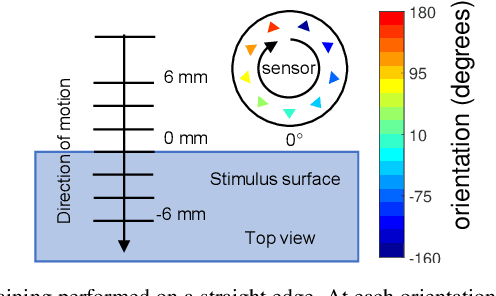
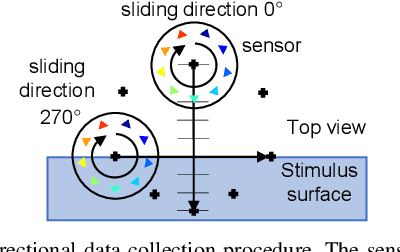
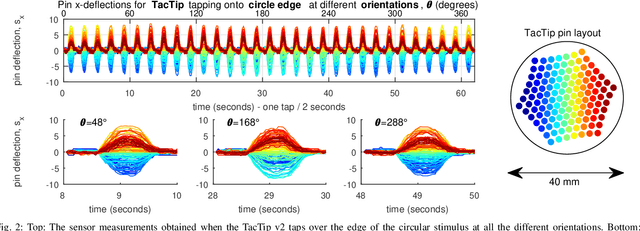
Manipulation tasks often require robots to be continuously in contact with an object. Therefore tactile perception systems need to handle continuous contact data. Shear deformation causes the tactile sensor to output path-dependent readings in contrast to discrete contact readings. As such, in some continuous-contact tasks, sliding can be regarded as a disturbance over the sensor signal. Here we present a shear-invariant perception method based on principal component analysis (PCA) which outputs the required information about the environment despite sliding motion. A compliant tactile sensor (the TacTip) is used to investigate continuous tactile contact. First, we evaluate the method offline using test data collected whilst the sensor slides over an edge. Then, the method is used within a contour-following task applied to 6 objects with varying curvatures; all contours are successfully traced. The method demonstrates generalisation capabilities and could underlie a more sophisticated controller for challenging manipulation or exploration tasks in unstructured environments. A video showing the work described in the paper can be found at https://youtu.be/wrTM61-pieU
Principal Components of Touch
Jun 08, 2018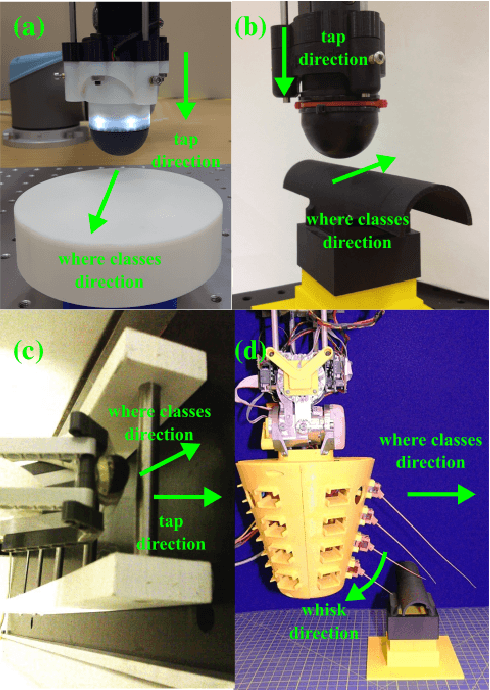
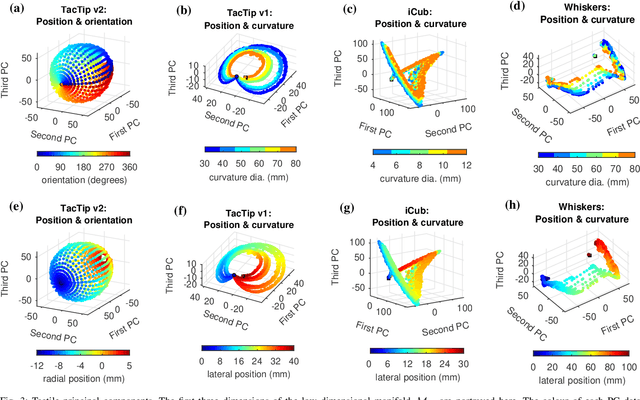
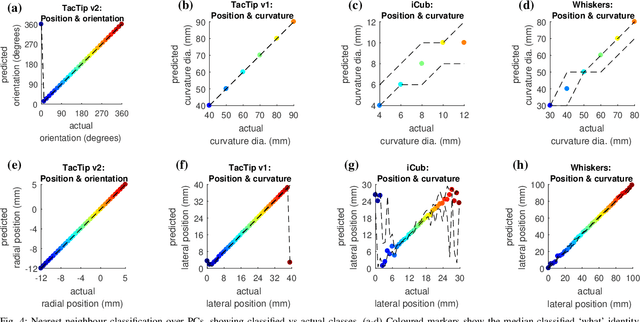
Our human sense of touch enables us to manipulate our surroundings; therefore, complex robotic manipulation will require artificial tactile sensing. Typically tactile sensor arrays are used in robotics, implying that a straightforward way of interpreting multidimensional data is required. In this paper we present a simple visualisation approach based on applying principal component analysis (PCA) to systematically collected sets of tactile data. We apply the visualisation approach to 4 different types of tactile sensor, encompassing fingertips and vibrissal arrays. The results show that PCA can reveal structure and regularities in the tactile data, which also permits the use of simple classifiers such as $k$-NN to achieve good inference. Additionally, the Euclidean distance in principal component space gives a measure of sensitivity, which can aid visualisation and also be used to find regions in the tactile input space where the sensor is able to perceive with higher accuracy. We expect that these observations will generalise, and thus offer the potential for novel control methods based on touch.