 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMissing Data Estimation for MR Spectroscopic Imaging via Mask-Free Deep Learning Methods
May 11, 2025Magnetic Resonance Spectroscopic Imaging (MRSI) is a powerful tool for non-invasive mapping of brain metabolites, providing critical insights into neurological conditions. However, its utility is often limited by missing or corrupted data due to motion artifacts, magnetic field inhomogeneities, or failed spectral fitting-especially in high resolution 3D acquisitions. To address this, we propose the first deep learning-based, mask-free framework for estimating missing data in MRSI metabolic maps. Unlike conventional restoration methods that rely on explicit masks to identify missing regions, our approach implicitly detects and estimates these areas using contextual spatial features through 2D and 3D U-Net architectures. We also introduce a progressive training strategy to enhance robustness under varying levels of data degradation. Our method is evaluated on both simulated and real patient datasets and consistently outperforms traditional interpolation techniques such as cubic and linear interpolation. The 2D model achieves an MSE of 0.002 and an SSIM of 0.97 with 20% missing voxels, while the 3D model reaches an MSE of 0.001 and an SSIM of 0.98 with 15% missing voxels. Qualitative results show improved fidelity in estimating missing data, particularly in metabolically heterogeneous regions and ventricular regions. Importantly, our model generalizes well to real-world datasets without requiring retraining or mask input. These findings demonstrate the effectiveness and broad applicability of mask-free deep learning for MRSI restoration, with strong potential for clinical and research integration.
Predicting Space Tourism Demand Using Explainable AI
Mar 05, 2025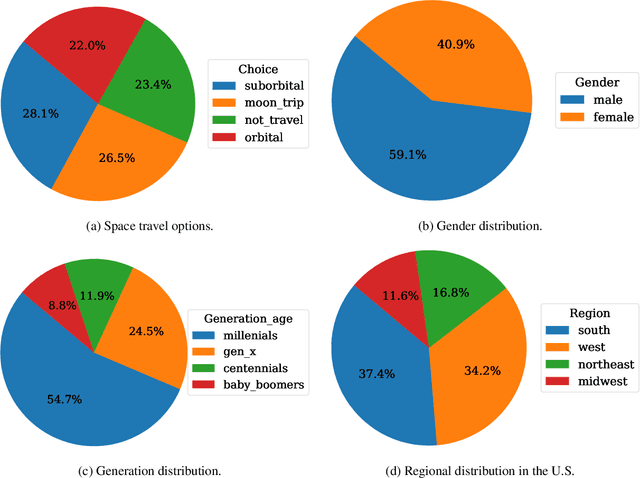
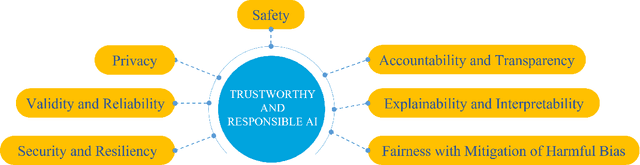
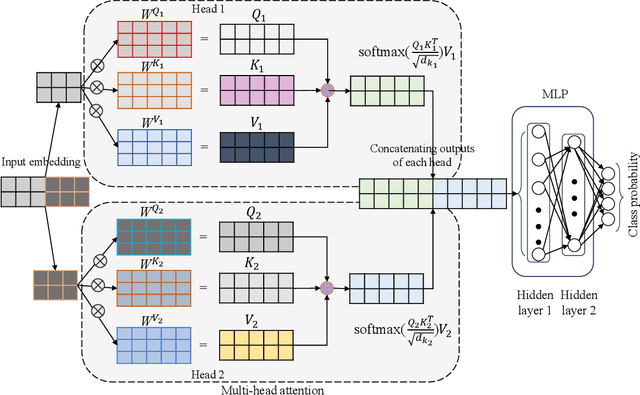
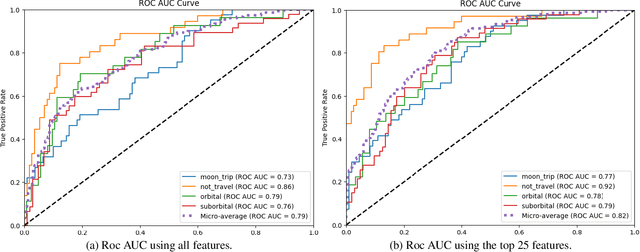
Comprehensive forecasts of space tourism demand are crucial for businesses to optimize strategies and customer experiences in this burgeoning industry. Traditional methods struggle to capture the complex factors influencing an individual's decision to travel to space. In this paper, we propose an explainable and trustworthy artificial intelligence framework to address the challenge of predicting space tourism demand by following the National Institute of Standards and Technology guidelines. We develop a novel machine learning network, called SpaceNet, capable of learning wide-range dependencies in data and allowing us to analyze the relationships between various factors such as age, income, and risk tolerance. We investigate space travel demand in the US, categorizing it into four types: no travel, moon travel, suborbital, and orbital travel. To this end, we collected 1860 data points in many states and cities with different ages and then conducted our experiment with the data. From our experiments, the SpaceNet achieves an average ROC-AUC of 0.82 $\pm$ 0.088, indicating strong classification performance. Our investigation demonstrated that travel price, age, annual income, gender, and fatality probability are important features in deciding whether a person wants to travel or not. Beyond demand forecasting, we use explainable AI to provide interpretation for the travel-type decisions of an individual, offering insights into the factors driving interest in space travel, which is not possible with traditional classification methods. This knowledge enables businesses to tailor marketing strategies and optimize service offerings in this rapidly evolving market. To the best of our knowledge, this is the first work to implement an explainable and interpretable AI framework for investigating the factors influencing space tourism.
Adaptive Compensation for Robotic Joint Failures Using Partially Observable Reinforcement Learning
Sep 22, 2024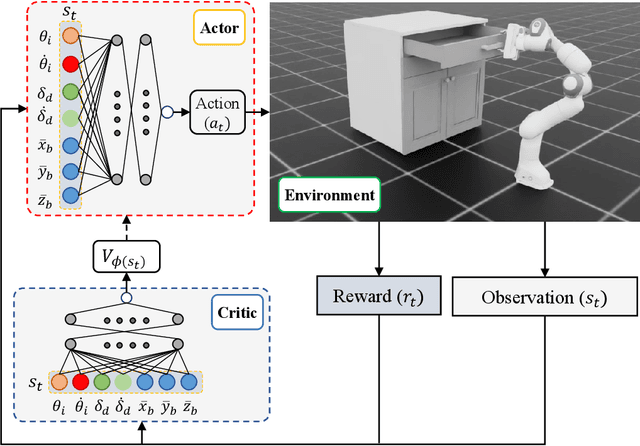
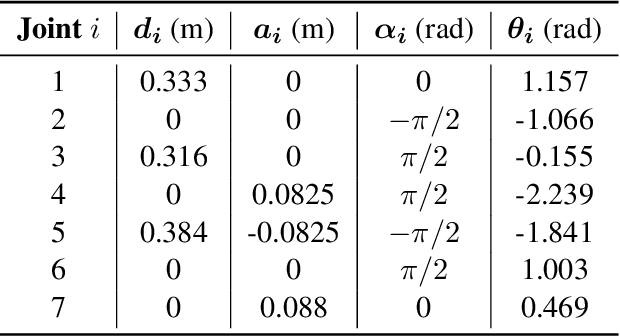
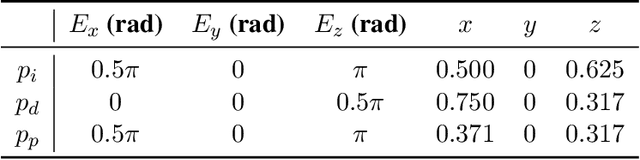
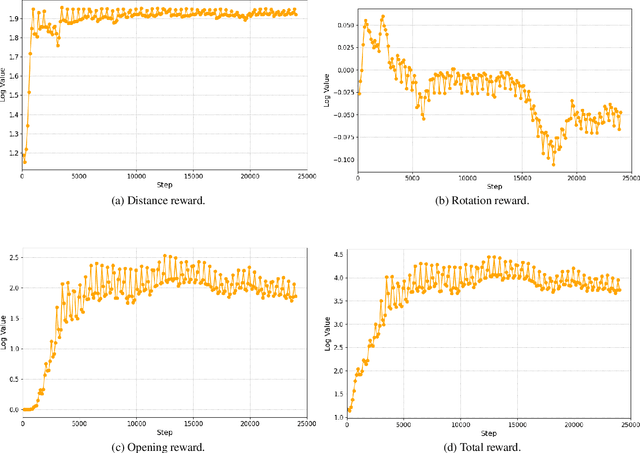
Robotic manipulators are widely used in various industries for complex and repetitive tasks. However, they remain vulnerable to unexpected hardware failures. In this study, we address the challenge of enabling a robotic manipulator to complete tasks despite joint malfunctions. Specifically, we develop a reinforcement learning (RL) framework to adaptively compensate for a non-functional joint during task execution. Our experimental platform is the Franka robot with 7 degrees of freedom (DOFs). We formulate the problem as a partially observable Markov decision process (POMDP), where the robot is trained under various joint failure conditions and tested in both seen and unseen scenarios. We consider scenarios where a joint is permanently broken and where it functions intermittently. Additionally, we demonstrate the effectiveness of our approach by comparing it with traditional inverse kinematics-based control methods. The results show that the RL algorithm enables the robot to successfully complete tasks even with joint failures, achieving a high success rate with an average rate of 93.6%. This showcases its robustness and adaptability. Our findings highlight the potential of RL to enhance the resilience and reliability of robotic systems, making them better suited for unpredictable environments. All related codes and models are published online.
Enhanced Droplet Analysis Using Generative Adversarial Networks
Feb 24, 2024



Precision devices play an important role in enhancing production quality and productivity in agricultural systems. Therefore, the optimization of these devices is essential in precision agriculture. Recently, with the advancements of deep learning, there have been several studies aiming to harness its capabilities for improving spray system performance. However, the effectiveness of these methods heavily depends on the size of the training dataset, which is expensive and time-consuming to collect. To address the challenge of insufficient training samples, this paper proposes an alternative solution by generating artificial images of droplets using generative adversarial networks (GAN). The GAN model is trained by using a small dataset captured by a high-speed camera and capable of generating images with progressively increasing resolution. The results demonstrate that the model can generate high-quality images with the size of $1024\times1024$. Furthermore, this research leverages recent advancements in computer vision and deep learning to develop a light droplet detector using the synthetic dataset. As a result, the detection model achieves a 16.06\% increase in mean average precision (mAP) when utilizing the synthetic dataset. To the best of our knowledge, this work stands as the first to employ a generative model for augmenting droplet detection. Its significance lies not only in optimizing nozzle design for constructing efficient spray systems but also in addressing the common challenge of insufficient data in various precision agriculture tasks. This work offers a critical contribution to conserving resources while striving for optimal and sustainable agricultural practices.
SeUNet-Trans: A Simple yet Effective UNet-Transformer Model for Medical Image Segmentation
Oct 22, 2023Automated medical image segmentation is becoming increasingly crucial in modern clinical practice, driven by the growing demand for precise diagnoses, the push towards personalized treatment plans, and advancements in machine learning algorithms, especially the incorporation of deep learning methods. While convolutional neural networks (CNNs) have been prevalent among these methods, the remarkable potential of Transformer-based models for computer vision tasks is gaining more acknowledgment. To harness the advantages of both CNN-based and Transformer-based models, we propose a simple yet effective UNet-Transformer (seUNet-Trans) model for medical image segmentation. In our approach, the UNet model is designed as a feature extractor to generate multiple feature maps from the input images, and these maps are propagated into a bridge layer, which sequentially connects the UNet and the Transformer. In this stage, we employ the pixel-level embedding technique without position embedding vectors to make the model more efficient. Moreover, we applied spatial-reduction attention in the Transformer to reduce the computational/memory overhead. By leveraging the UNet architecture and the self-attention mechanism, our model not only preserves both local and global context information but also captures long-range dependencies between input elements. The proposed model is extensively experimented on five medical image segmentation datasets, including polyp segmentation, to demonstrate its efficacy. A comparison with several state-of-the-art segmentation models on these datasets shows the superior performance of seUNet-Trans.
Deep-Learning Framework for Optimal Selection of Soil Sampling Sites
Sep 02, 2023This work leverages the recent advancements of deep learning in image processing to find optimal locations that present the important characteristics of a field. The data for training are collected at different fields in local farms with five features: aspect, flow accumulation, slope, NDVI (normalized difference vegetation index), and yield. The soil sampling dataset is challenging because the ground truth is highly imbalanced binary images. Therefore, we approached the problem with two methods, the first approach involves utilizing a state-of-the-art model with the convolutional neural network (CNN) backbone, while the second is to innovate a deep-learning design grounded in the concepts of transformer and self-attention. Our framework is constructed with an encoder-decoder architecture with the self-attention mechanism as the backbone. In the encoder, the self-attention mechanism is the key feature extractor, which produces feature maps. In the decoder, we introduce atrous convolution networks to concatenate, fuse the extracted features, and then export the optimal locations for soil sampling. Currently, the model has achieved impressive results on the testing dataset, with a mean accuracy of 99.52%, a mean Intersection over Union (IoU) of 57.35%, and a mean Dice Coefficient of 71.47%, while the performance metrics of the state-of-the-art CNN-based model are 66.08%, 3.85%, and 1.98%, respectively. This indicates that our proposed model outperforms the CNN-based method on the soil-sampling dataset. To the best of our knowledge, our work is the first to provide a soil-sampling dataset with multiple attributes and leverage deep learning techniques to enable the automatic selection of soil-sampling sites. This work lays a foundation for novel applications of data science and machine-learning technologies to solve other emerging agricultural problems.