 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Learning of Dynamics Using Prior Domain Knowledge in the Sampling Process
Mar 25, 2024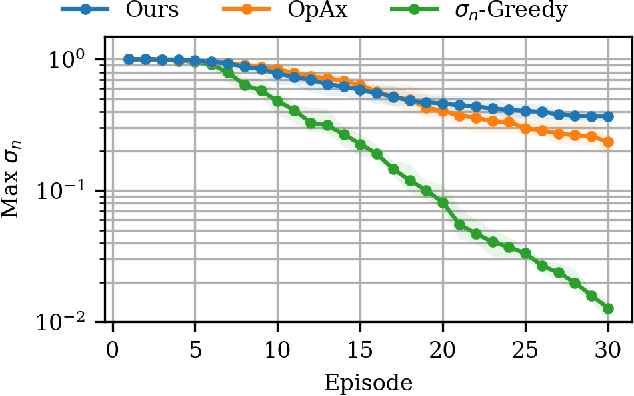
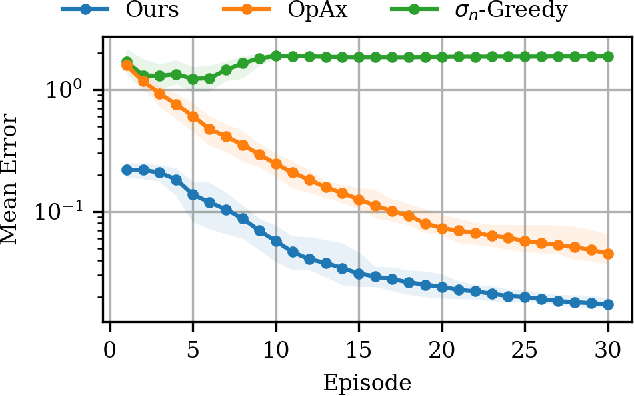
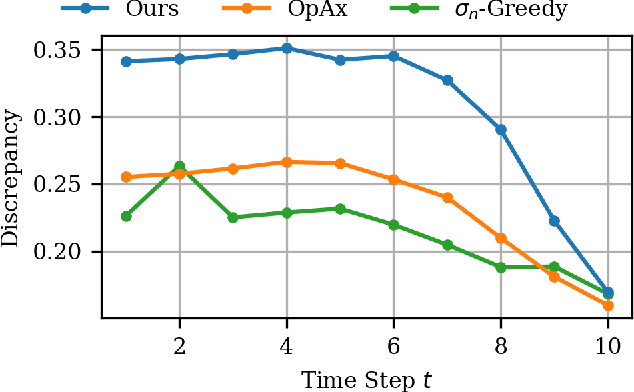
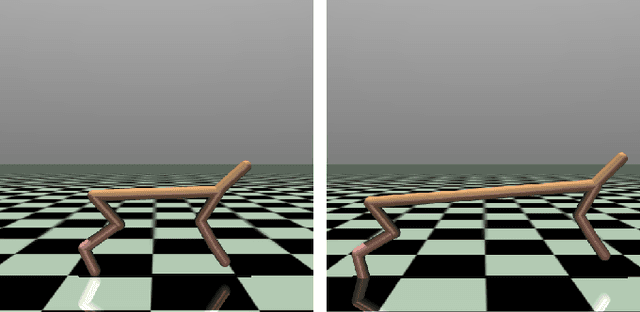
We present an active learning algorithm for learning dynamics that leverages side information by explicitly incorporating prior domain knowledge into the sampling process. Our proposed algorithm guides the exploration toward regions that demonstrate high empirical discrepancy between the observed data and an imperfect prior model of the dynamics derived from side information. Through numerical experiments, we demonstrate that this strategy explores regions of high discrepancy and accelerates learning while simultaneously reducing model uncertainty. We rigorously prove that our active learning algorithm yields a consistent estimate of the underlying dynamics by providing an explicit rate of convergence for the maximum predictive variance. We demonstrate the efficacy of our approach on an under-actuated pendulum system and on the half-cheetah MuJoCo environment.