 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRPSRNet: End-to-End Trainable Rigid Point Set Registration Network using Barnes-Hut $2^D$-Tree Representation
Apr 12, 2021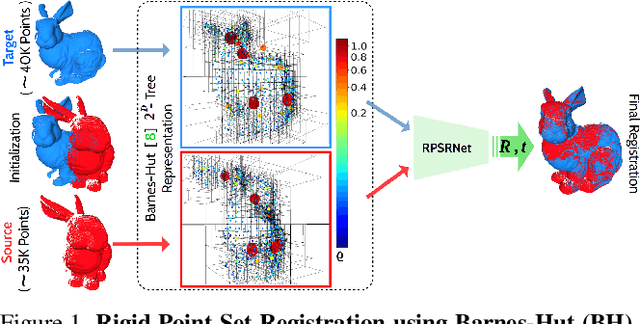
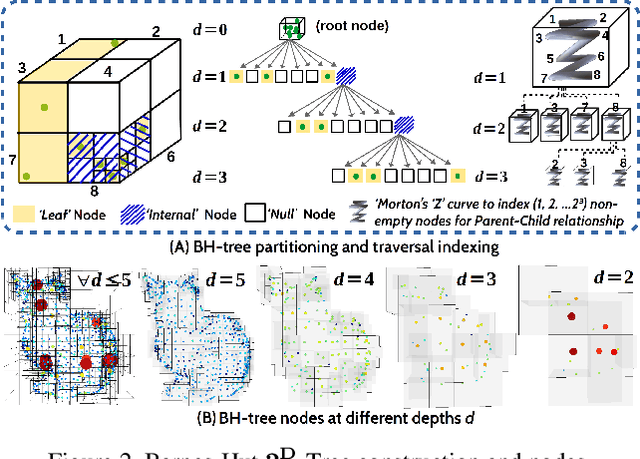

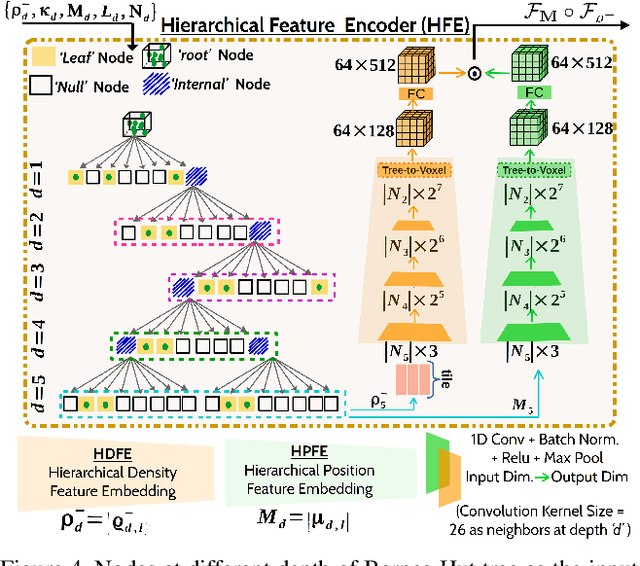
We propose RPSRNet - a novel end-to-end trainable deep neural network for rigid point set registration. For this task, we use a novel $2^D$-tree representation for the input point sets and a hierarchical deep feature embedding in the neural network. An iterative transformation refinement module in our network boosts the feature matching accuracy in the intermediate stages. We achieve an inference speed of 12-15ms to register a pair of input point clouds as large as 250K. Extensive evaluation on (i) KITTI LiDAR odometry and (ii) ModelNet-40 datasets shows that our method outperforms prior state-of-the-art methods - e.g., on the KITTI data set, DCP-v2 by1.3 and 1.5 times, and PointNetLK by 1.8 and 1.9 times better rotational and translational accuracy respectively. Evaluation on ModelNet40 shows that RPSRNet is more robust than other benchmark methods when the samples contain a significant amount of noise and other disturbances. RPSRNet accurately registers point clouds with non-uniform sampling densities, e.g., LiDAR data, which cannot be processed by many existing deep-learning-based registration methods.
Fast Gravitational Approach for Rigid Point Set Registration with Ordinary Differential Equations
Sep 28, 2020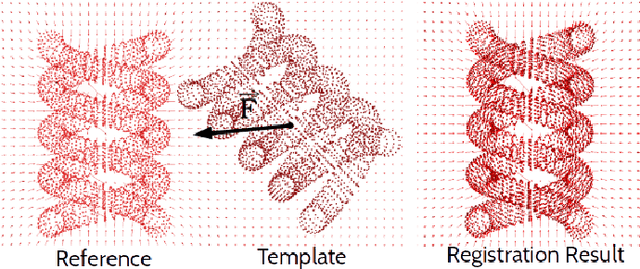
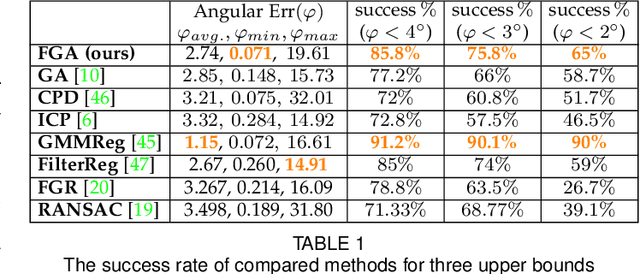


This article introduces a new physics-based method for rigid point set alignment called Fast Gravitational Approach (FGA). In FGA, the source and target point sets are interpreted as rigid particle swarms with masses interacting in a globally multiply-linked manner while moving in a simulated gravitational force field. The optimal alignment is obtained by explicit modeling of forces acting on the particles as well as their velocities and displacements with second-order ordinary differential equations of motion. Additional alignment cues (point-based or geometric features, and other boundary conditions) can be integrated into FGA through particle masses. We propose a smooth-particle mass function for point mass initialization, which improves robustness to noise and structural discontinuities. To avoid prohibitive quadratic complexity of all-to-all point interactions, we adapt a Barnes-Hut tree for accelerated force computation and achieve quasilinear computational complexity. We show that the new method class has characteristics not found in previous alignment methods such as efficient handling of partial overlaps, inhomogeneous point sampling densities, and coping with large point clouds with reduced runtime compared to the state of the art. Experiments show that our method performs on par with or outperforms all compared competing non-deep-learning-based and general-purpose techniques (which do not assume the availability of training data and a scene prior) in resolving transformations for LiDAR data and gains state-of-the-art accuracy and speed when coping with different types of data disturbances.