 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiTrack: Bidirectional Offline 3D Multi-Object Tracking Using Camera-LiDAR Data
Jun 26, 2024



Compared with real-time multi-object tracking (MOT), offline multi-object tracking (OMOT) has the advantages to perform 2D-3D detection fusion, erroneous link correction, and full track optimization but has to deal with the challenges from bounding box misalignment and track evaluation, editing, and refinement. This paper proposes "BiTrack", a 3D OMOT framework that includes modules of 2D-3D detection fusion, initial trajectory generation, and bidirectional trajectory re-optimization to achieve optimal tracking results from camera-LiDAR data. The novelty of this paper includes threefold: (1) development of a point-level object registration technique that employs a density-based similarity metric to achieve accurate fusion of 2D-3D detection results; (2) development of a set of data association and track management skills that utilizes a vertex-based similarity metric as well as false alarm rejection and track recovery mechanisms to generate reliable bidirectional object trajectories; (3) development of a trajectory re-optimization scheme that re-organizes track fragments of different fidelities in a greedy fashion, as well as refines each trajectory with completion and smoothing techniques. The experiment results on the KITTI dataset demonstrate that BiTrack achieves the state-of-the-art performance for 3D OMOT tasks in terms of accuracy and efficiency.
Joint Multi-Object Detection and Tracking with Camera-LiDAR Fusion for Autonomous Driving
Aug 10, 2021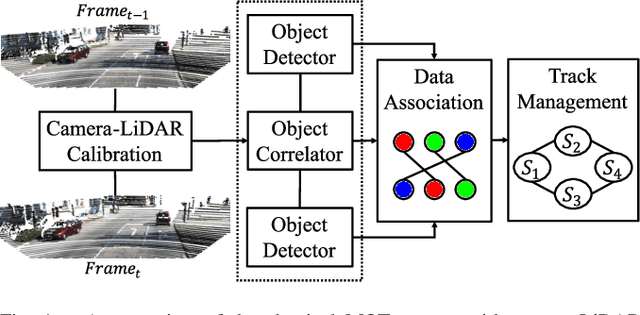

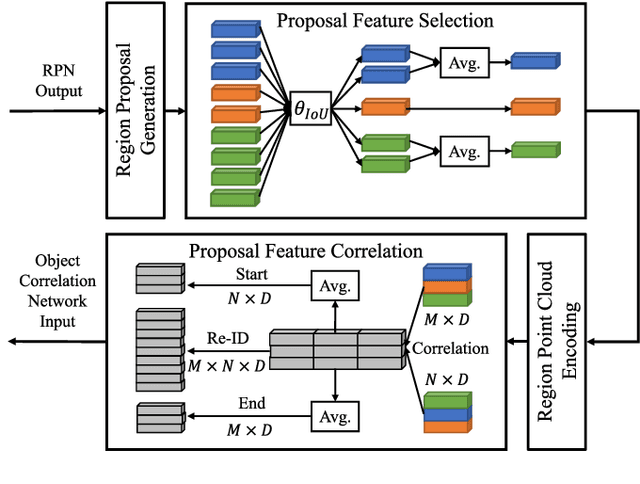

Multi-object tracking (MOT) with camera-LiDAR fusion demands accurate results of object detection, affinity computation and data association in real time. This paper presents an efficient multi-modal MOT framework with online joint detection and tracking schemes and robust data association for autonomous driving applications. The novelty of this work includes: (1) development of an end-to-end deep neural network for joint object detection and correlation using 2D and 3D measurements; (2) development of a robust affinity computation module to compute occlusion-aware appearance and motion affinities in 3D space; (3) development of a comprehensive data association module for joint optimization among detection confidences, affinities and start-end probabilities. The experiment results on the KITTI tracking benchmark demonstrate the superior performance of the proposed method in terms of both tracking accuracy and processing speed.