 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Signal Separation with Learnable Spectral Filters
Apr 27, 2026Separating multiple graph signals from a single observed mixture is an inherently ill-posed problem that traditionally relies on restrictive and handcrafted priors. This letter addresses this challenge by proposing an unsupervised learnable spectral filtering framework. Our approach reconstructs latent components by passing a fixed random input through learnable spectral filters, operating within the low-frequency eigenspace of each source-specific graph Laplacian. The architecture implicitly biases the recovered signals toward smooth patterns by confining reconstruction to these low-frequency subspaces. This acts as a structural prior, establishing a principled bridge between classical graph spectral analysis and modern neural decomposition. Numerical experiments confirm that this framework successfully isolates individual sources using solely the observed mixture and the underlying graph topology.
Virtual Smart Metering in District Heating Networks via Heterogeneous Spatial-Temporal Graph Neural Networks
Apr 11, 2026Intelligent operation of thermal energy networks aims to improve energy efficiency, reliability, and operational flexibility through data-driven control, predictive optimization, and early fault detection. Achieving these goals relies on sufficient observability, requiring continuous and well-distributed monitoring of thermal and hydraulic states. However, district heating systems are typically sparsely instrumented and frequently affected by sensor faults, limiting monitoring. Virtual sensing offers a cost-effective means to enhance observability, yet its development and validation remain limited in practice. Existing data-driven methods generally assume dense synchronized data, while analytical models rely on simplified hydraulic and thermal assumptions that may not adequately capture the behavior of heterogeneous network topologies. Consequently, modeling the coupled nonlinear dependencies between pressure, flow, and temperature under realistic operating conditions remains challenging. In addition, the lack of publicly available benchmark datasets hinders systematic comparison of virtual sensing approaches. To address these challenges, we propose a heterogeneous spatial-temporal graph neural network (HSTGNN) for constructing virtual smart heat meters. The model incorporates the functional relationships inherent in district heating networks and employs dedicated branches to learn graph structures and temporal dynamics for flow, temperature, and pressure measurements, thereby enabling the joint modeling of cross-variable and spatial correlations. To support further research, we introduce a controlled laboratory dataset collected at the Aalborg Smart Water Infrastructure Laboratory, providing synchronized high-resolution measurements representative of real operating conditions. Extensive experiments demonstrate that the proposed approach significantly outperforms existing baselines.
Time-Vertex Machine Learning for Optimal Sensor Placement in Temporal Graph Signals: Applications in Structural Health Monitoring
Dec 22, 2025Structural Health Monitoring (SHM) plays a crucial role in maintaining the safety and resilience of infrastructure. As sensor networks grow in scale and complexity, identifying the most informative sensors becomes essential to reduce deployment costs without compromising monitoring quality. While Graph Signal Processing (GSP) has shown promise by leveraging spatial correlations among sensor nodes, conventional approaches often overlook the temporal dynamics of structural behavior. To overcome this limitation, we propose Time-Vertex Machine Learning (TVML), a novel framework that integrates GSP, time-domain analysis, and machine learning to enable interpretable and efficient sensor placement by identifying representative nodes that minimize redundancy while preserving critical information. We evaluate the proposed approach on two bridge datasets for damage detection and time-varying graph signal reconstruction tasks. The results demonstrate the effectiveness of our approach in enhancing SHM systems by providing a robust, adaptive, and efficient solution for sensor placement.
Efficient Unsupervised Domain Adaptation Regression for Spatial-Temporal Air Quality Sensor Fusion
Nov 11, 2024



The deployment of affordable Internet of Things (IoT) sensors for air pollution monitoring has increased in recent years due to their scalability and cost-effectiveness. However, accurately calibrating these sensors in uncontrolled environments remains a significant challenge. While expensive reference sensors can provide accurate ground truth data, they are often deployed on a limited scale due to high costs, leading to a scarcity of labeled data. In diverse urban environments, data distributions constantly shift due to varying factors such as traffic patterns, industrial activities, and weather conditions, which impact sensor readings. Consequently, traditional machine learning models -- despite their increasing deployment for environmental sensor calibration -- often struggle to provide reliable pollutant measurements across different locations due to domain shifts. To address these challenges, we propose a novel unsupervised domain adaptation (UDA) method specifically tailored for regression tasks on graph-structured data. Our approach leverages Graph Neural Networks (GNNs) to model the relationships between sensors. To effectively capture critical spatial-temporal interactions, we incorporate spatial-temporal graph neural networks (STGNNs), which extend GNNs by incorporating temporal dynamics. To handle the resulting larger embeddings, we propose a domain adaptation method using a closed-form solution inspired by the Tikhonov-regularized least-squares problem. This method leverages Cholesky decomposition and power iteration to align the subspaces between source and target domains. By aligning these subspaces, our approach allows low-cost IoT sensors to learn calibration parameters from expensive reference sensors. This facilitates reliable pollutant measurements in new locations without the need for additional costly equipment.
Informed Graph Learning By Domain Knowledge Injection and Smooth Graph Signal Representation
Jun 06, 2024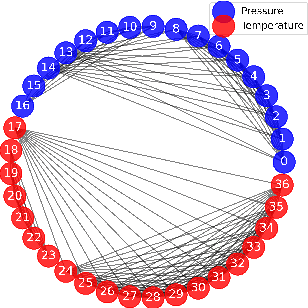
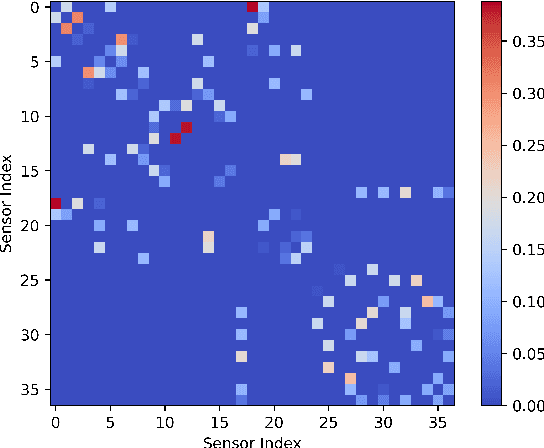
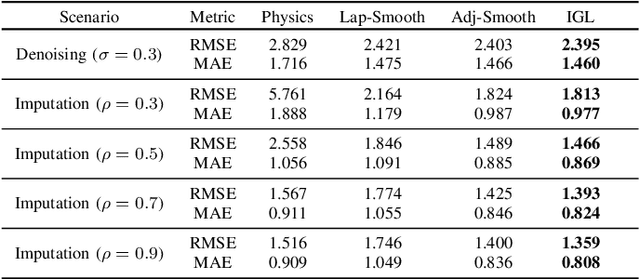
Graph signal processing represents an important advancement in the field of data analysis, extending conventional signal processing methodologies to complex networks and thereby facilitating the exploration of informative patterns and structures across various domains. However, acquiring the underlying graphs for specific applications remains a challenging task. While graph inference based on smooth graph signal representation has become one of the state-of-the-art methods, these approaches usually overlook the unique properties of networks, which are generally derived from domain-specific knowledge. Overlooking this information could make the approaches less interpretable and less effective overall. In this study, we propose a new graph inference method that leverages available domain knowledge. The proposed methodology is evaluated on the task of denoising and imputing missing sensor data, utilizing graph signal reconstruction techniques. The results demonstrate that incorporating domain knowledge into the graph inference process can improve graph signal reconstruction in district heating networks. Our code is available at \href{https://github.com/Keiv4n/IGL}{github.com/Keiv4n/IGL}.
Physics-Enhanced Graph Neural Networks For Soft Sensing in Industrial Internet of Things
Apr 11, 2024The Industrial Internet of Things (IIoT) is reshaping manufacturing, industrial processes, and infrastructure management. By fostering new levels of automation, efficiency, and predictive maintenance, IIoT is transforming traditional industries into intelligent, seamlessly interconnected ecosystems. However, achieving highly reliable IIoT can be hindered by factors such as the cost of installing large numbers of sensors, limitations in retrofitting existing systems with sensors, or harsh environmental conditions that may make sensor installation impractical. Soft (virtual) sensing leverages mathematical models to estimate variables from physical sensor data, offering a solution to these challenges. Data-driven and physics-based modeling are the two main methodologies widely used for soft sensing. The choice between these strategies depends on the complexity of the underlying system, with the data-driven approach often being preferred when the physics-based inference models are intricate and present challenges for state estimation. However, conventional deep learning models are typically hindered by their inability to explicitly represent the complex interactions among various sensors. To address this limitation, we adopt Graph Neural Networks (GNNs), renowned for their ability to effectively capture the complex relationships between sensor measurements. In this research, we propose physics-enhanced GNNs, which integrate principles of physics into graph-based methodologies. This is achieved by augmenting additional nodes in the input graph derived from the underlying characteristics of the physical processes. Our evaluation of the proposed methodology on the case study of district heating networks reveals significant improvements over purely data-driven GNNs, even in the presence of noise and parameter inaccuracies.
Spatial-Temporal Graph Attention Fuser for Calibration in IoT Air Pollution Monitoring Systems
Sep 08, 2023The use of Internet of Things (IoT) sensors for air pollution monitoring has significantly increased, resulting in the deployment of low-cost sensors. Despite this advancement, accurately calibrating these sensors in uncontrolled environmental conditions remains a challenge. To address this, we propose a novel approach that leverages graph neural networks, specifically the graph attention network module, to enhance the calibration process by fusing data from sensor arrays. Through our experiments, we demonstrate the effectiveness of our approach in significantly improving the calibration accuracy of sensors in IoT air pollution monitoring platforms.