 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Local Experience: Informed Sampling Distributions for High Dimensional Motion Planning
Jun 15, 2023

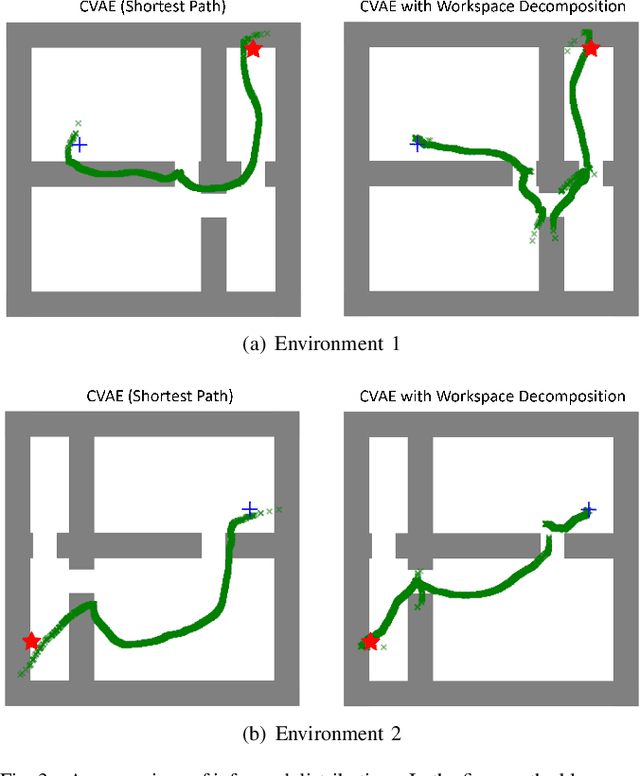

This paper presents a sampling-based motion planning framework that leverages the geometry of obstacles in a workspace as well as prior experiences from motion planning problems. Previous studies have demonstrated the benefits of utilizing prior solutions to motion planning problems for improving planning efficiency. However, particularly for high-dimensional systems, achieving high performance across randomized environments remains a technical challenge for experience-based approaches due to the substantial variance between each query. To address this challenge, we propose a novel approach that involves decoupling the problem into subproblems through algorithmic workspace decomposition and graph search. Additionally, we capitalize on prior experience within each subproblem. This approach effectively reduces the variance across different problems, leading to improved performance for experience-based planners. To validate the effectiveness of our framework, we conduct experiments using 2D and 6D robotic systems. The experimental results demonstrate that our framework outperforms existing algorithms in terms of planning time and cost.