 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards A Natural Language Interface for Flexible Multi-Agent Task Assignment
Nov 09, 2023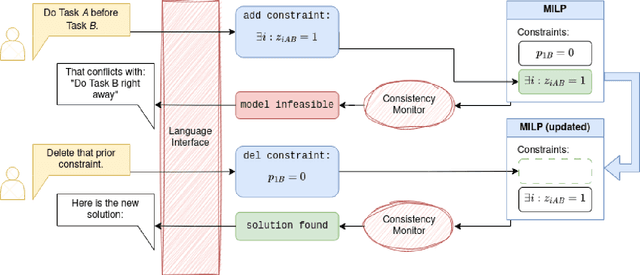
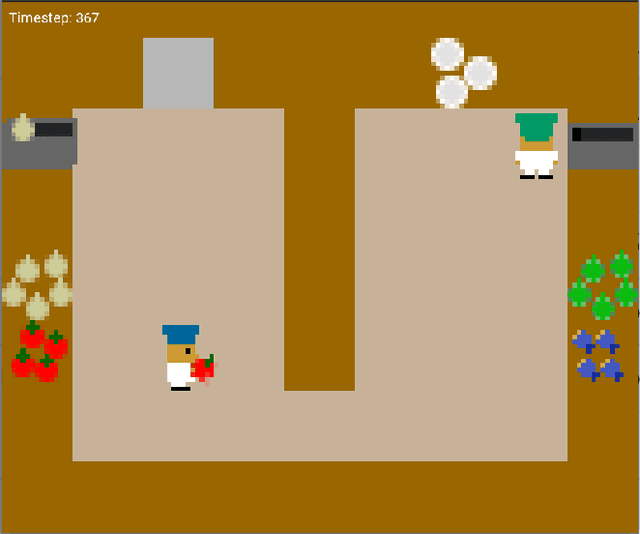
Task assignment and scheduling algorithms are powerful tools for autonomously coordinating large teams of robotic or AI agents. However, the decisions these system make often rely on components designed by domain experts, which can be difficult for non-technical end-users to understand or modify to their own ends. In this paper we propose a preliminary design for a flexible natural language interface for a task assignment system. The goal of our approach is both to grant users more control over a task assignment system's decision process, as well as render these decisions more transparent. Users can direct the task assignment system via natural language commands, which are applied as constraints to a mixed-integer linear program (MILP) using a large language model (LLM). Additionally, our proposed system can alert users to potential issues with their commands, and engage them in a corrective dialogue in order to find a viable solution. We conclude with a description of our planned user-evaluation in the simulated environment Overcooked and describe next steps towards developing a flexible and transparent task allocation system.
Bilevel Optimization for Just-in-Time Robotic Kitting and Delivery via Adaptive Task Segmentation and Scheduling
Sep 17, 2022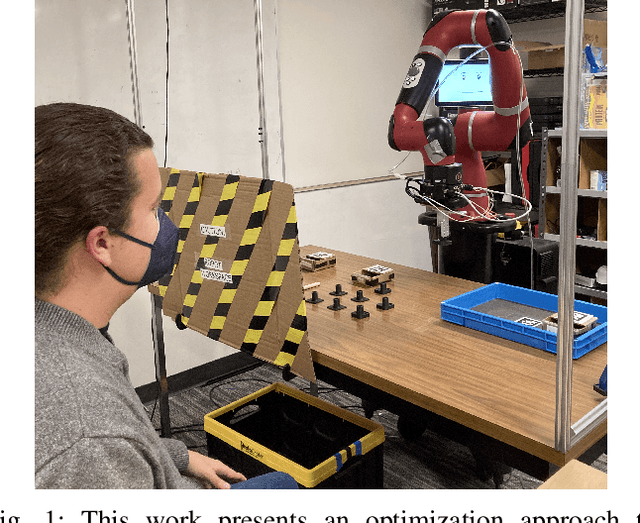
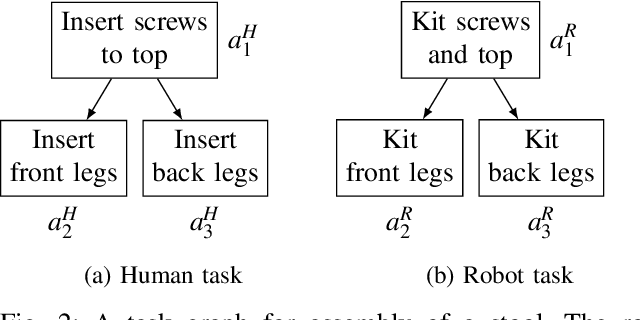
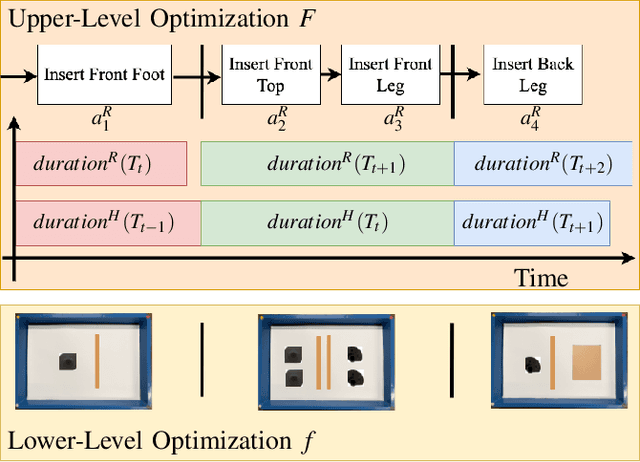
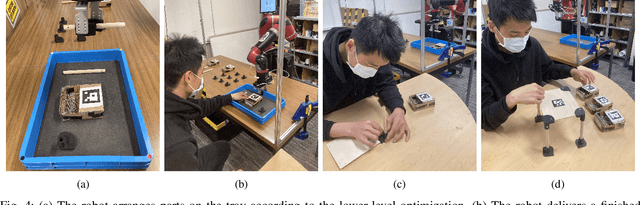
Kitting refers to the task of preparing and grouping necessary parts and tools (or "kits") for assembly in a manufacturing environment. Automating this process simplifies the assembly task for human workers and improves efficiency. Existing automated kitting systems adhere to scripted instructions and predefined heuristics. However, given variability in the availability of parts and logistic delays, the inflexibility of existing systems can limit the overall efficiency of an assembly line. In this paper, we propose a bilevel optimization framework to enable a robot to perform task segmentation-based part selection, kit arrangement, and delivery scheduling to provide custom-tailored kits just in time - i.e., right when they are needed. We evaluate the proposed approach both through a human subjects study (n=18) involving the construction of a flat-pack furniture table and shop-flow simulation based on the data from the study. Our results show that the just-in-time kitting system is objectively more efficient, resilient to upstream shop flow delays, and subjectively more preferable as compared to baseline approaches of using kits defined by rigid task segmentation boundaries defined by the task graph itself or a single kit that includes all parts necessary to assemble a single unit.