 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMedicine Strip Identification using 2-D Cepstral Feature Extraction and Multiclass Classification Methods
Feb 03, 2020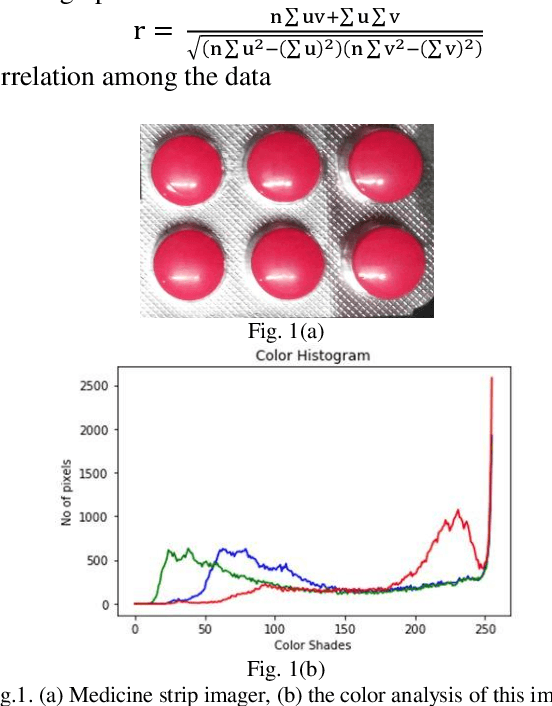

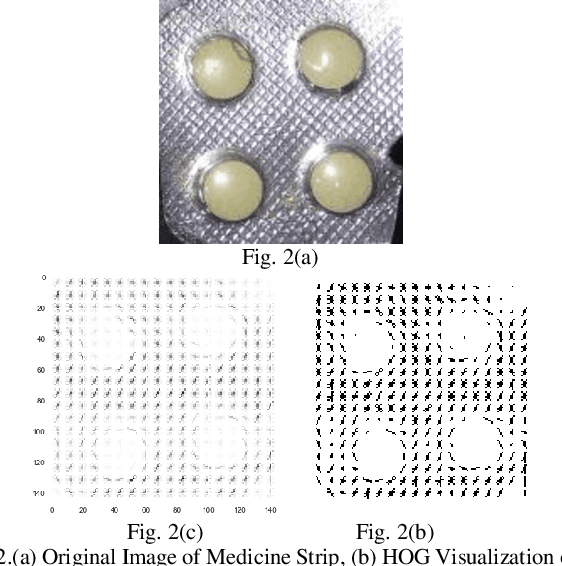
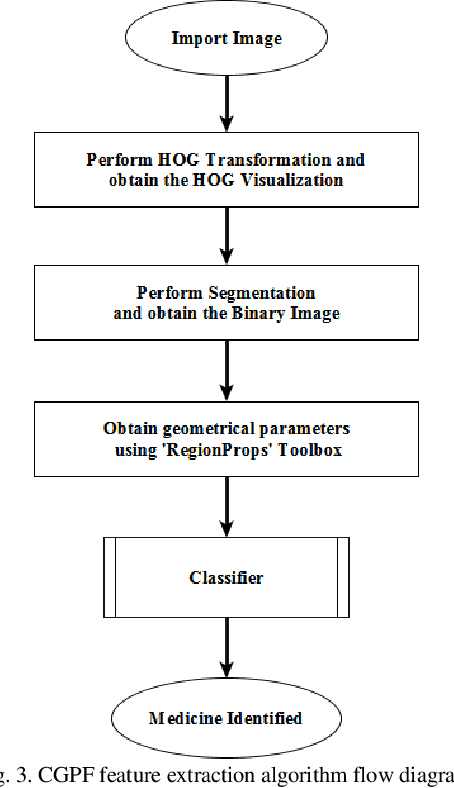
Misclassification of medicine is perilous to the health of a patient, more so if the said patient is visually impaired or simply did not recognize the color, shape or type of medicine strip. This paper proposes a method for identification of medicine strips by 2-D cepstral analysis of their images followed by performing classification that has been done using the K-Nearest Neighbor (KNN), Support Vector Machine (SVM) and Logistic Regression (LR) Classifiers. The 2-D cepstral features extracted are extremely distinct to a medicine strip and consequently make identifying them exceptionally accurate. This paper also proposes the Color Gradient and Pill shape Feature (CGPF) extraction procedure and discusses the Binary Robust Invariant Scalable Keypoints (BRISK) algorithm as well. The mentioned algorithms were implemented and their identification results have been compared.
Radial Based Analysis of GRNN in Non-Textured Image Inpainting
Jan 13, 2020Image inpainting algorithms are used to restore some damaged or missing information region of an image based on the surrounding information. The method proposed in this paper applies the radial based analysis of image inpainting on GRNN. The damaged areas are first isolated from rest of the areas and then arranged by their size and then inpainted using GRNN. The training of the neural network is done using different radii to achieve a better outcome. A comparative analysis is done for different regression-based algorithms. The overall results are compared with the results achieved by the other algorithms as LS-SVM with reference to the PSNR value.
Image Segmentation and Processing for Efficient Parking Space Analysis
Mar 13, 2018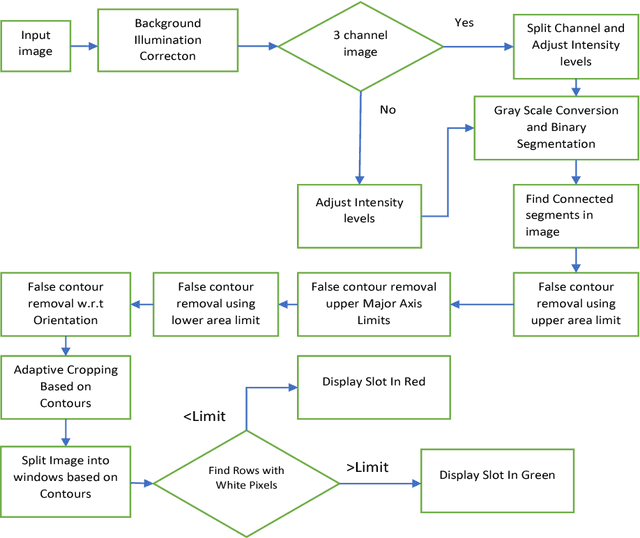
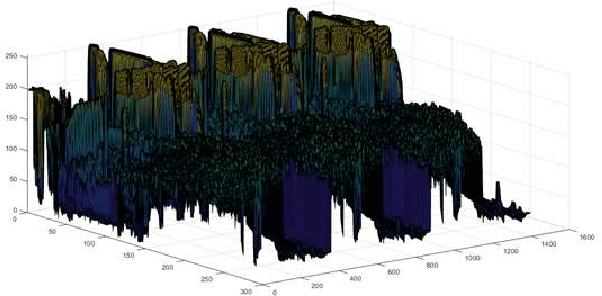
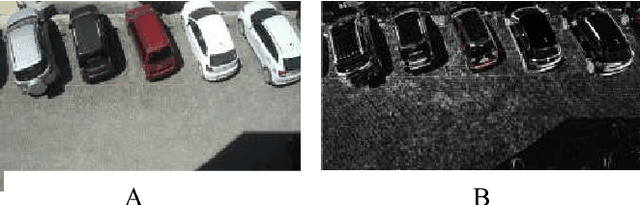
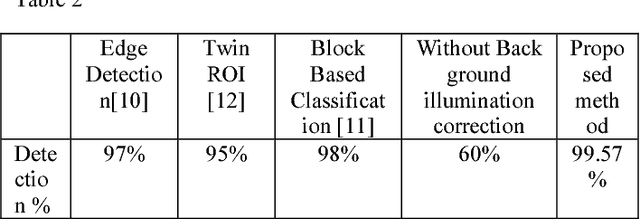
In this paper, we develop a method to detect vacant parking spaces in an environment with unclear segments and contours with the help of MATLAB image processing capabilities. Due to the anomalies present in the parking spaces, such as uneven illumination, distorted slot lines and overlapping of cars. The present-day conventional algorithms have difficulties processing the image for accurate results. The algorithm proposed uses a combination of image pre-processing and false contour detection techniques to improve the detection efficiency. The proposed method also eliminates the need to employ individual sensors to detect a car, instead uses real-time static images to consider a group of slots together, instead of the usual single slot method. This greatly decreases the expenses required to design an efficient parking system. We compare the performance of our algorithm to that of other techniques. These comparisons show that the proposed algorithm can detect the vacancies in the parking spots while ignoring the false data and other distortions.