 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle Flow Gaussian Sum Particle Filter
Nov 09, 2022



Particle flow Gaussian particle flow (PFGPF) uses an invertible particle flow to generate a proposal density. It approximates the predictive and posterior distributions as Gaussian densities. In this paper, we use bank of PFGPF filters to construct a Particle flow Gaussian sum particle filter (PFGSPF), which approximates the predictive and posterior as Gaussian mixture model. This approximation is useful in complex estimation problems where a single Gaussian approximation is not sufficient. We compare the performance of this proposed filter with PFGPF and others in challenging numerical simulations.
Particle Flow Gaussian Particle Filter
Jul 04, 2022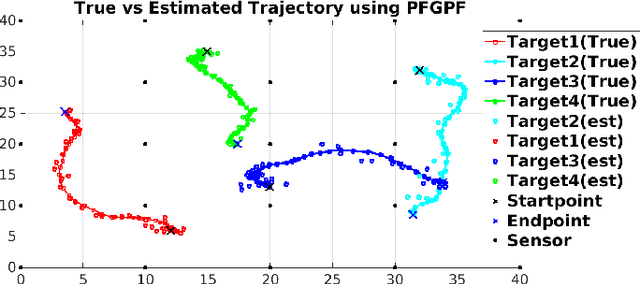
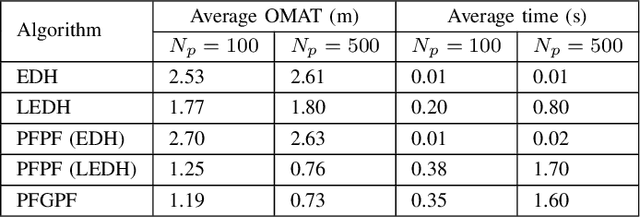
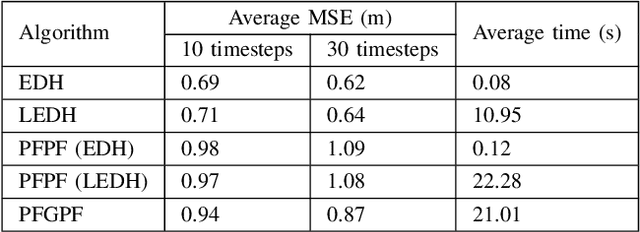
State estimation in non-linear models is performed by tracking the posterior distribution recursively. A plethora of algorithms have been proposed for this task. Among them, the Gaussian particle filter uses a weighted set of particles to construct a Gaussian approximation to the posterior. In this paper, we propose to use invertible particle flow methods, derived under the Gaussian boundary conditions for a flow equation, to generate a proposal distribution close to the posterior. The resultant particle flow Gaussian particle filter (PFGPF) algorithm retains the asymptotic properties of Gaussian particle filters, with the potential for improved state estimation performance in high dimensional spaces. We compare the performance of PFGPF with the particle flow filters and particle flow particle filters in two challenging numerical simulation examples.