 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeErgodic exploration of dynamic distribution
Mar 14, 2025

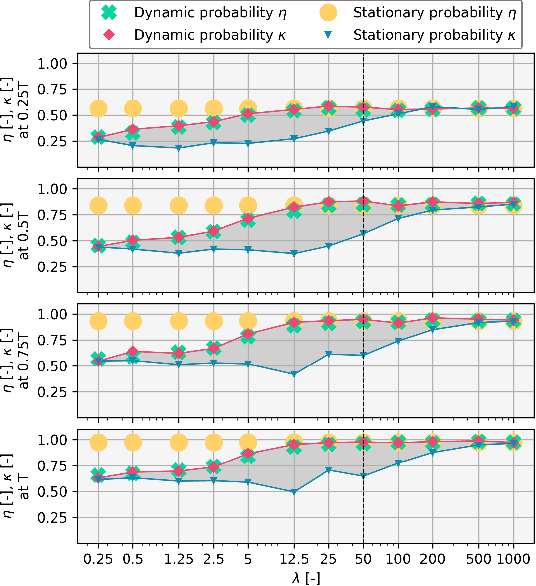

This research addresses the challenge of performing search missions in dynamic environments, particularly for drifting targets whose movement is dictated by a flow field. This is accomplished through a dynamical system that integrates two partial differential equations: one governing the dynamics and uncertainty of the probability distribution, and the other regulating the potential field for ergodic multi-agent search. The target probability field evolves in response to the target dynamics imposed by the environment and accomplished sensing efforts, while being explored by multiple robot agents guided by the potential field gradient. The proposed methodology was tested on two simulated search scenarios, one of which features a synthetically generated domain and showcases better performance when compared to the baseline method with static target probability over a range of agent to flow field velocity ratios. The second search scenario represents a realistic sea search and rescue mission where the search start is delayed, the search is performed in multiple robot flight missions, and the procedure for target drift uncertainty compensation is demonstrated. Furthermore, the proposed method provides an accurate survey completion metric, based on the known detection/sensing parameters, that correlates with the actual number of targets found independently.
Experimental validation of UAV search and detection system in real wilderness environment
Feb 24, 2025



Search and rescue (SAR) missions require reliable search methods to locate survivors, especially in challenging or inaccessible environments. This is why introducing unmanned aerial vehicles (UAVs) can be of great help to enhance the efficiency of SAR missions while simultaneously increasing the safety of everyone involved in the mission. Motivated by this, we design and experiment with autonomous UAV search for humans in a Mediterranean karst environment. The UAVs are directed using Heat equation-driven area coverage (HEDAC) ergodic control method according to known probability density and detection function. The implemented sensing framework consists of a probabilistic search model, motion control system, and computer vision object detection. It enables calculation of the probability of the target being detected in the SAR mission, and this paper focuses on experimental validation of proposed probabilistic framework and UAV control. The uniform probability density to ensure the even probability of finding the targets in the desired search area is achieved by assigning suitably thought-out tasks to 78 volunteers. The detection model is based on YOLO and trained with a previously collected ortho-photo image database. The experimental search is carefully planned and conducted, while as many parameters as possible are recorded. The thorough analysis consists of the motion control system, object detection, and the search validation. The assessment of the detection and search performance provides strong indication that the designed detection model in the UAV control algorithm is aligned with real-world results.
Model predictive altitude and velocity control in ergodic potential field directed multi-UAV search
Jan 05, 2024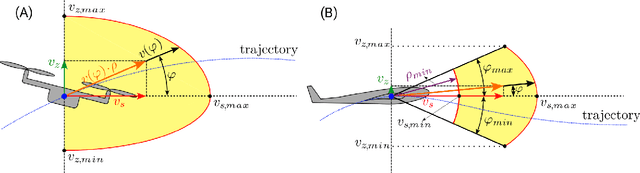


This research addresses the challenge of executing multi-UAV survey missions over diverse terrains characterized by varying elevations. The approach integrates advanced two-dimensional ergodic search technique with model predictive control of UAV altitude and velocity. Optimization of altitude and velocity is performed along anticipated UAV ground routes, considering multiple objectives and constraints. This yields a flight regimen tailored to the terrain, as well as the motion and sensing characteristics of the UAVs. The proposed UAV motion control strategy is assessed through simulations of realistic search missions and actual terrain models. Results demonstrate the successful integration of model predictive altitude and velocity control with a two-dimensional potential field-guided ergodic search. Adjusting UAV altitudes to near-ideal levels facilitates the utilization of sensing ranges, thereby enhancing the effectiveness of the search. Furthermore, the control algorithm is capable of real-time computation, encouraging its practical application in real-world scenarios.