 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiMatcher: Improve matching in point cloud registration via local-to-global geometric consistency learning
Sep 10, 2025This paper presents iMatcher, a fully differentiable framework for feature matching in point cloud registration. The proposed method leverages learned features to predict a geometrically consistent confidence matrix, incorporating both local and global consistency. First, a local graph embedding module leads to an initialization of the score matrix. A subsequent repositioning step refines this matrix by considering bilateral source-to-target and target-to-source matching via nearest neighbor search in 3D space. The paired point features are then stacked together to be refined through global geometric consistency learning to predict a point-wise matching probability. Extensive experiments on real-world outdoor (KITTI, KITTI-360) and indoor (3DMatch) datasets, as well as on 6-DoF pose estimation (TUD-L) and partial-to-partial matching (MVP-RG), demonstrate that iMatcher significantly improves rigid registration performance. The method achieves state-of-the-art inlier ratios, scoring 95% - 97% on KITTI, 94% - 97% on KITTI-360, and up to 81.1% on 3DMatch, highlighting its robustness across diverse settings.
LoGDesc: Local geometric features aggregation for robust point cloud registration
Oct 03, 2024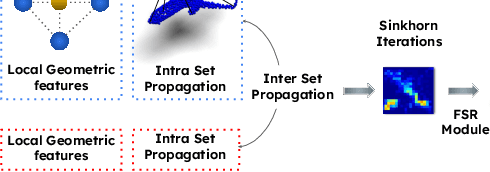
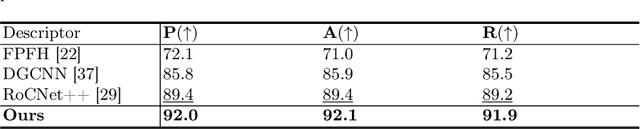
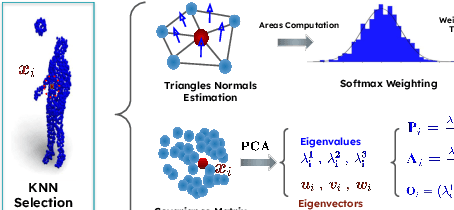
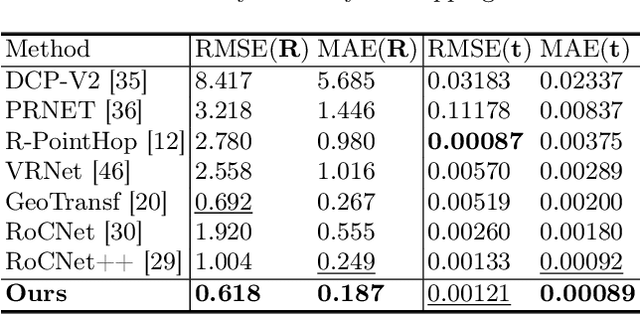
This paper introduces a new hybrid descriptor for 3D point matching and point cloud registration, combining local geometrical properties and learning-based feature propagation for each point's neighborhood structure description. The proposed architecture first extracts prior geometrical information by computing each point's planarity, anisotropy, and omnivariance using a Principal Components Analysis (PCA). This prior information is completed by a descriptor based on the normal vectors estimated thanks to constructing a neighborhood based on triangles. The final geometrical descriptor is propagated between the points using local graph convolutions and attention mechanisms. The new feature extractor is evaluated on ModelNet40, Bunny Stanford dataset, KITTI and MVP (Multi-View Partial)-RG for point cloud registration and shows interesting results, particularly on noisy and low overlapping point clouds.
RoCNet: 3D Robust Registration of Point-Clouds using Deep Learning
Mar 14, 2023This paper introduces a new method for 3D point cloud registration based on deep learning. The architecture is composed of three distinct blocs: (i) an encoder composed of a convolutional graph-based descriptor that encodes the immediate neighbourhood of each point and an attention mechanism that encodes the variations of the surface normals. Such descriptors are refined by highlighting attention between the points of the same set and then between the points of the two sets. (ii) a matching process that estimates a matrix of correspondences using the Sinkhorn algorithm. (iii) Finally, the rigid transformation between the two point clouds is calculated by RANSAC using the Kc best scores from the correspondence matrix. We conduct experiments on the ModelNet40 dataset, and our proposed architecture shows very promising results, outperforming state-of-the-art methods in most of the simulated configurations, including partial overlap and data augmentation with Gaussian noise.