 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom implicit learning to explicit representations
Apr 05, 2022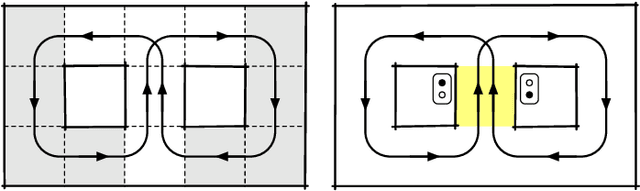
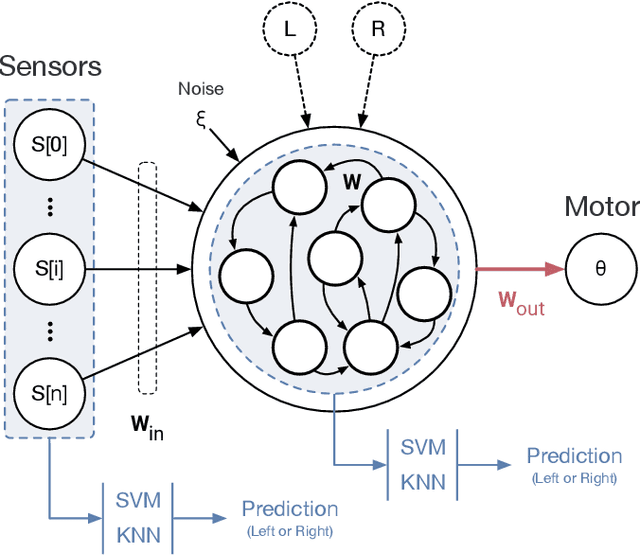
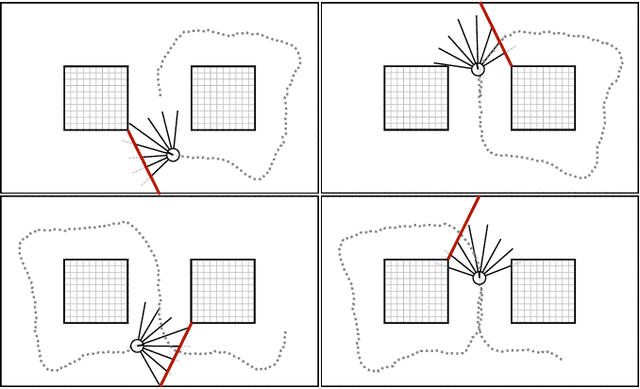
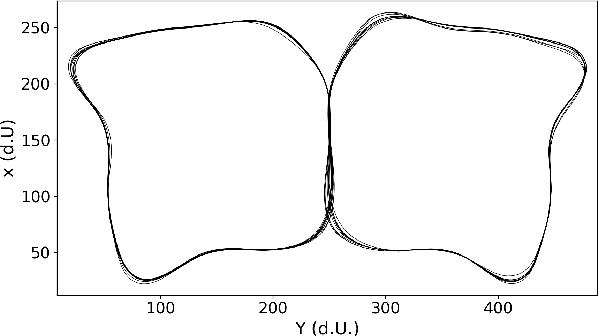
Using the reservoir computing framework, we demonstrate how a simple model can solve an alternation task without an explicit working memory. To do so, a simple bot equipped with sensors navigates inside a 8-shaped maze and turns alternatively right and left at the same intersection in the maze. The analysis of the model's internal activity reveals that the memory is actually encoded inside the dynamics of the network. However, such dynamic working memory is not accessible such as to bias the behavior into one of the two attractors (left and right). To do so, external cues are fed to the bot such that it can follow arbitrary sequences, instructed by the cue. This model highlights the idea that procedural learning and its internal representation can be dissociated. If the former allows to produce behavior, it is not sufficient to allow for an explicit and fine-grained manipulation.