 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards human-like kinematics in industrial robotic arms: a case study on a UR3 robot
Sep 25, 2024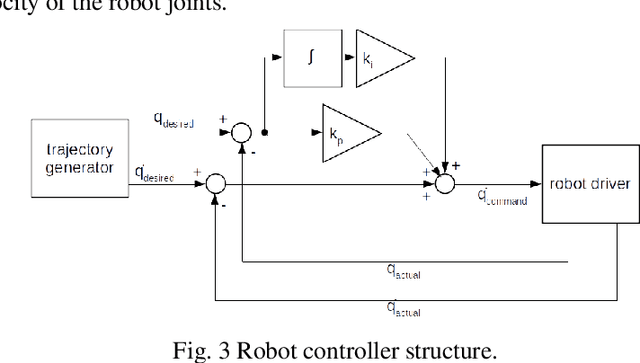
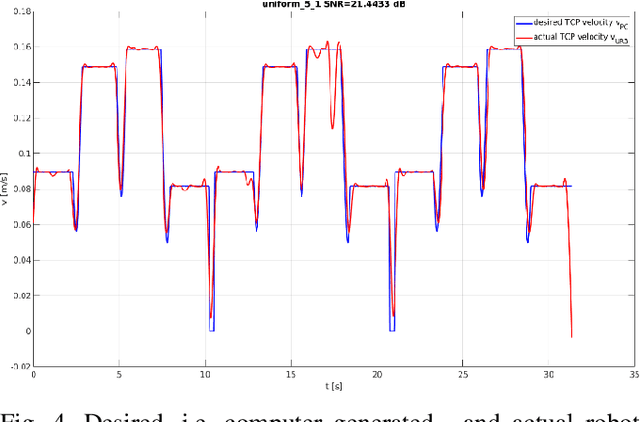
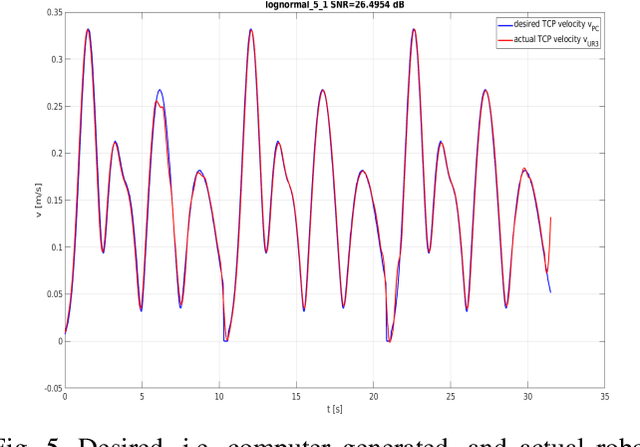
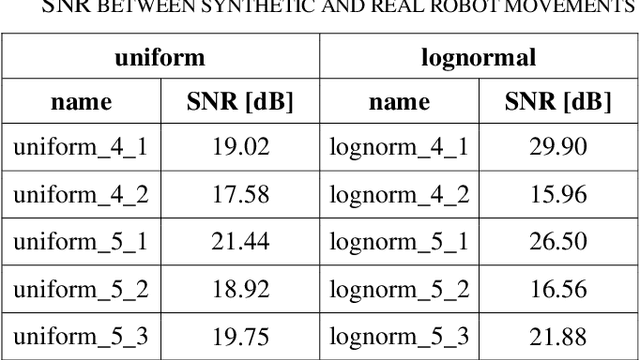
Safety in industrial robotic environments is a hot research topic in the area of human-robot interaction (HRI). Up to now, a robotic arm on an assembly line interacts with other machines away from human workers. Nowadays, robotic arm manufactures are aimed to their robots could increasingly perform tasks collaborating with humans. One of the ways to improve this collaboration is by making the movement of robots more humanlike. This way, it would be easier for a human to foresee the movement of the robot and approach it without fear of contact. The main difference between the movement of a human and of a robotic arm is that the former has a bell-shaped speed profile while the latter has a uniform speed one. To generate this speed profile, the kinematic theory of rapid human movements and its Sigma-Lognormal model has been used. This model is widely used to explain most of the basic phenomena related to the control of human movements. Both human-like and robotic-like movements are transferred to the UR3 robot. In this paper we detail the how the UR3 robot was programmed to produce both kinds of movement. The dissimilarities result between the input motion and output motion to the robot confirm the possibility to develop human-like velocities in the UR3 robot.
* 6 pages, 5 figures