 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tree-based Next-best-trajectory Method for 3D UAV Exploration
Jul 05, 2024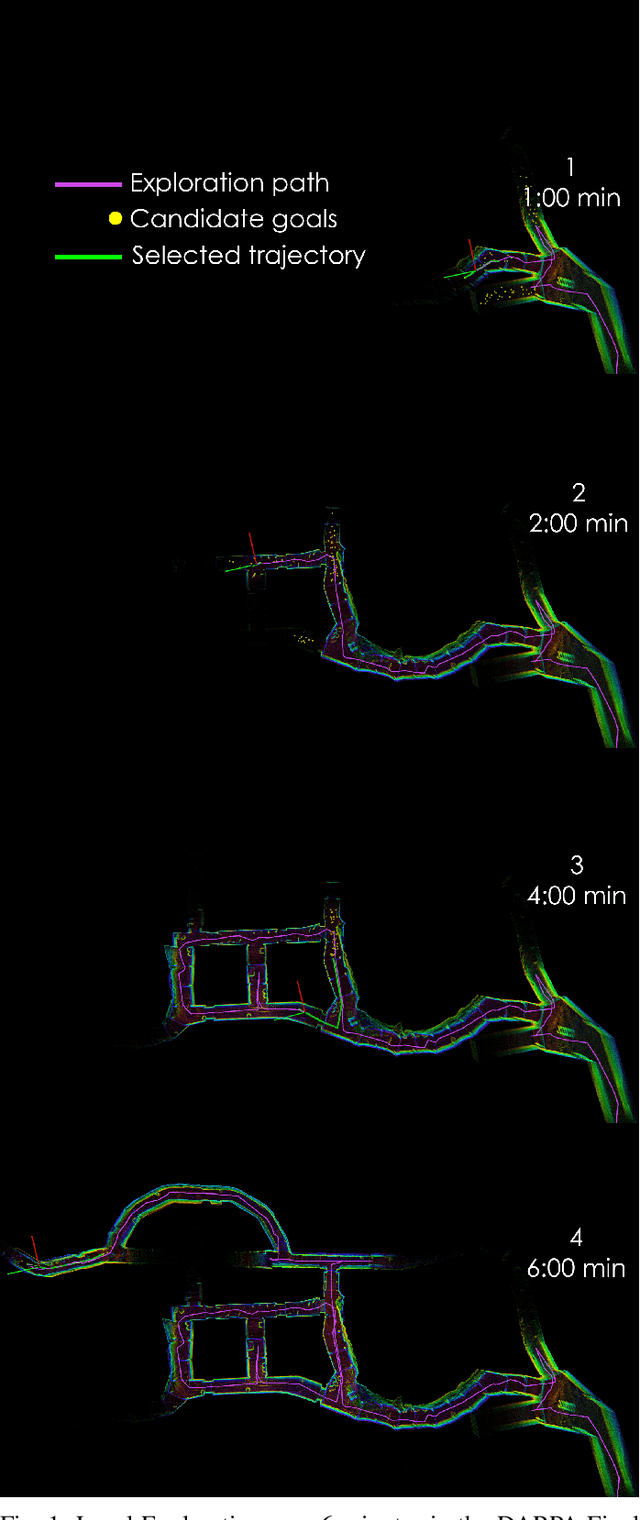
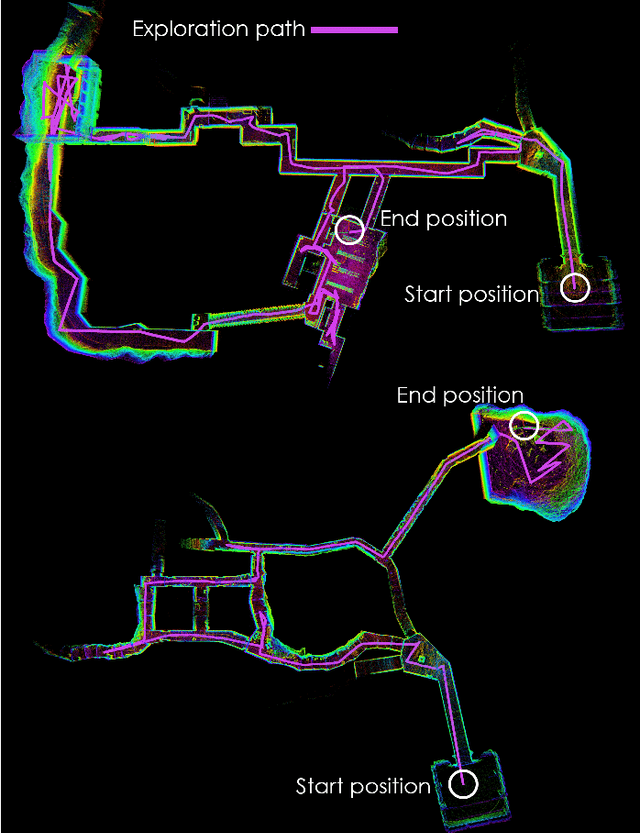
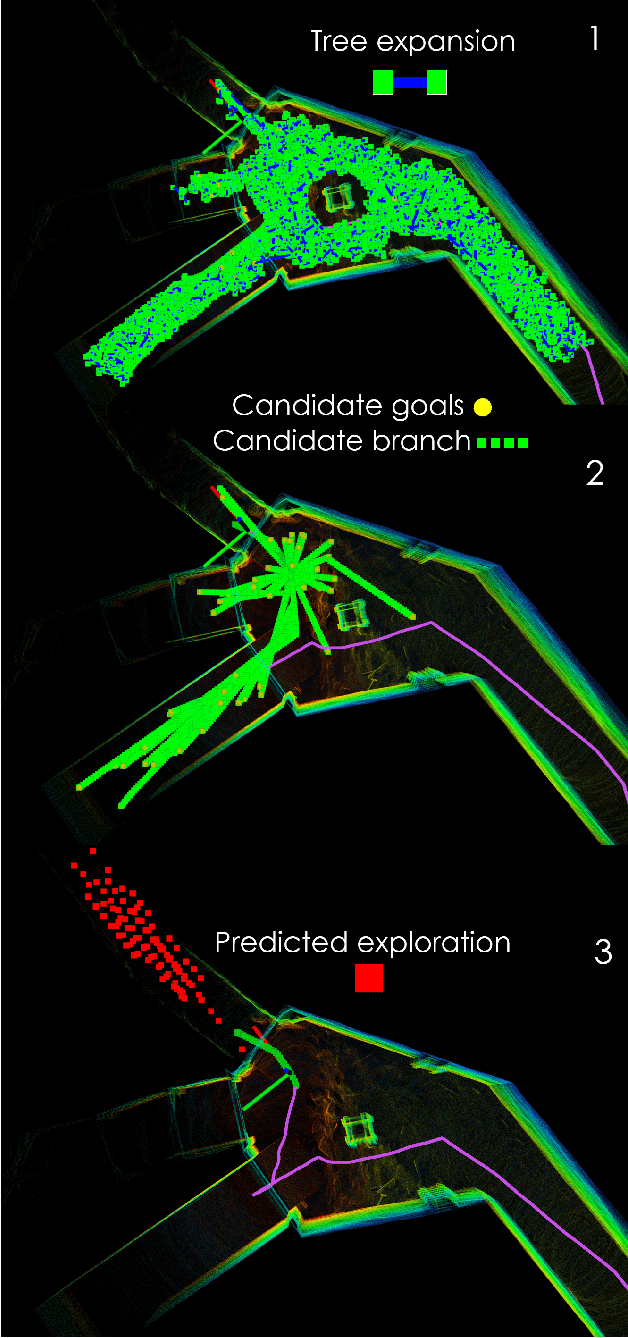
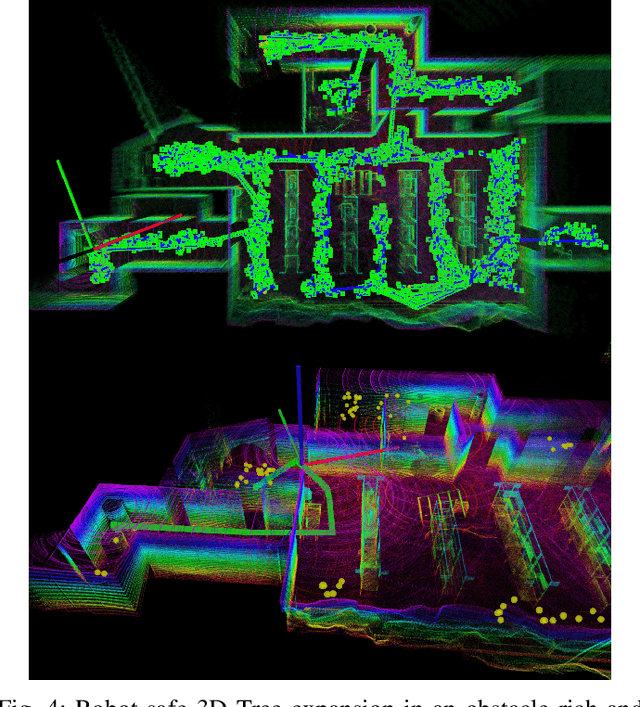
This work presents a fully integrated tree-based combined exploration-planning algorithm: Exploration-RRT (ERRT). The algorithm is focused on providing real-time solutions for local exploration in a fully unknown and unstructured environment while directly incorporating exploratory behavior, robot-safe path planning, and robot actuation into the central problem. ERRT provides a complete sampling and tree-based solution for evaluating "where to go next" by considering a trade-off between maximizing information gain, and minimizing the distances travelled and the robot actuation along the path. The complete scheme is evaluated in extensive simulations, comparisons, as well as real-world field experiments in constrained and narrow subterranean and GPS-denied environments. The framework is fully ROS-integrated, straight-forward to use, and we open-source it at https://github.com/LTU-RAI/ExplorationRRT.