Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Efficient Moion Planning for UAVs: Lazy A* Search with Motion Primitives
Oct 02, 2024
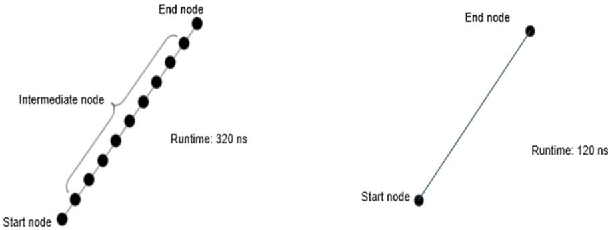
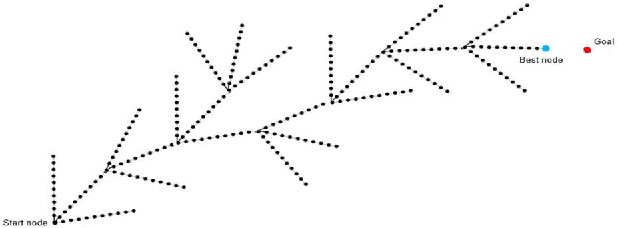

Search-based motion planning algorithms have been widely utilized for unmanned aerial vehicles (UAVs). However, deploying these algorithms on real UAVs faces challenges due to limited onboard computational resources. The algorithms struggle to find solutions in high-dimensional search spaces and require considerable time to ensure that the trajectories are dynamically feasible. This paper incorporates the lazy search concept into search-based planning algorithms to address the critical issue of real-time planning for collision-free and dynamically feasible trajectories on UAVs. We demonstrate that the lazy search motion planning algorithm can efficiently find optimal trajectories and significantly improve computational efficiency.
Via