 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Tailoring: Evaluating Influence of Image Features on Fashion Product Popularity
Nov 22, 2024



Identifying key product features that influence consumer preferences is essential in the fashion industry. In this study, we introduce a robust methodology to ascertain the most impactful features in fashion product images, utilizing past market sales data. First, we propose the metric called "influence score" to quantitatively assess the importance of product features. Then we develop a forecasting model, the Fashion Demand Predictor (FDP), which integrates Transformer-based models and Random Forest to predict market popularity based on product images. We employ image-editing diffusion models to modify these images and perform an ablation study, which validates the impact of the highest and lowest-scoring features on the model's popularity predictions. Additionally, we further validate these results through surveys that gather human rankings of preferences, confirming the accuracy of the FDP model's predictions and the efficacy of our method in identifying influential features. Notably, products enhanced with "good" features show marked improvements in predicted popularity over their modified counterparts. Our approach develops a fully automated and systematic framework for fashion image analysis that provides valuable guidance for downstream tasks such as fashion product design and marketing strategy development.
Optimizing Coordinated Vehicle Platooning: An Analytical Approach Based on Stochastic Dynamic Programming
Mar 29, 2020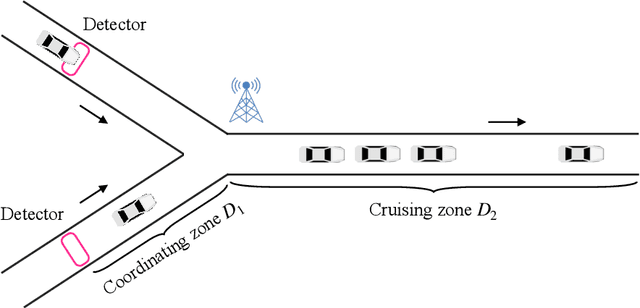



Platooning connected and autonomous vehicles (CAVs) can improve traffic and fuel efficiency. However, scalable platooning operations requires junction-level coordination, which has not been well studied. In this paper, we study the coordination of vehicle platooning at highway junctions. We consider a setting where CAVs randomly arrive at a highway junction according to a general renewal process. When a CAV approaches the junction, a system operator determines whether the CAV will merge into the platoon ahead according to the positions and speeds of the CAV and the platoon. We formulate a Markov decision process to minimize the discounted cumulative travel cost, i.e. fuel consumption plus travel delay, over an infinite time horizon. We show that the optimal policy is threshold-based: the CAV will merge with the platoon if and only if the difference between the CAV's and the platoon's predicted times of arrival at the junction is less than a constant threshold. We also propose two ready-to-implement algorithms to derive the optimal policy. Comparison with the classical value iteration algorithm implies that our approach explicitly incorporating the characteristics of the optimal policy is significantly more efficient in terms of computation. Importantly, we show that the optimal policy under Poisson arrivals can be obtained by solving a system of integral equations. We also validate our results in simulation with Real-time Strategy (RTS) using real traffic data. The simulation results indicate that the proposed method yields better performance compared with the conventional method.