 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Blending: Rethinking Alpha Blending in 3D Gaussian Splatting
Nov 19, 2025


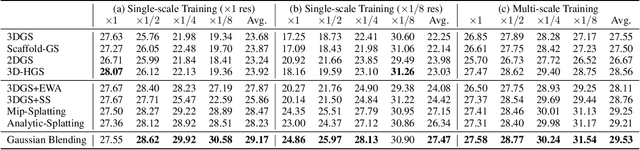
The recent introduction of 3D Gaussian Splatting (3DGS) has significantly advanced novel view synthesis. Several studies have further improved the rendering quality of 3DGS, yet they still exhibit noticeable visual discrepancies when synthesizing views at sampling rates unseen during training. Specifically, they suffer from (i) erosion-induced blurring artifacts when zooming in and (ii) dilation-induced staircase artifacts when zooming out. We speculate that these artifacts arise from the fundamental limitation of the alpha blending adopted in 3DGS methods. Instead of the conventional alpha blending that computes alpha and transmittance as scalar quantities over a pixel, we propose to replace it with our novel Gaussian Blending that treats alpha and transmittance as spatially varying distributions. Thus, transmittances can be updated considering the spatial distribution of alpha values across the pixel area, allowing nearby background splats to contribute to the final rendering. Our Gaussian Blending maintains real-time rendering speed and requires no additional memory cost, while being easily integrated as a drop-in replacement into existing 3DGS-based or other NVS frameworks. Extensive experiments demonstrate that Gaussian Blending effectively captures fine details at various sampling rates unseen during training, consistently outperforming existing novel view synthesis models across both unseen and seen sampling rates.
ESR-NeRF: Emissive Source Reconstruction Using LDR Multi-view Images
Apr 24, 2024



Existing NeRF-based inverse rendering methods suppose that scenes are exclusively illuminated by distant light sources, neglecting the potential influence of emissive sources within a scene. In this work, we confront this limitation using LDR multi-view images captured with emissive sources turned on and off. Two key issues must be addressed: 1) ambiguity arising from the limited dynamic range along with unknown lighting details, and 2) the expensive computational cost in volume rendering to backtrace the paths leading to final object colors. We present a novel approach, ESR-NeRF, leveraging neural networks as learnable functions to represent ray-traced fields. By training networks to satisfy light transport segments, we regulate outgoing radiances, progressively identifying emissive sources while being aware of reflection areas. The results on scenes encompassing emissive sources with various properties demonstrate the superiority of ESR-NeRF in qualitative and quantitative ways. Our approach also extends its applicability to the scenes devoid of emissive sources, achieving lower CD metrics on the DTU dataset.
EP2P-Loc: End-to-End 3D Point to 2D Pixel Localization for Large-Scale Visual Localization
Sep 14, 2023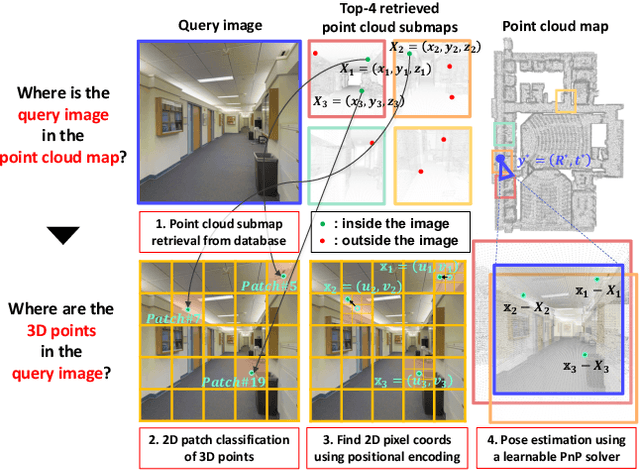
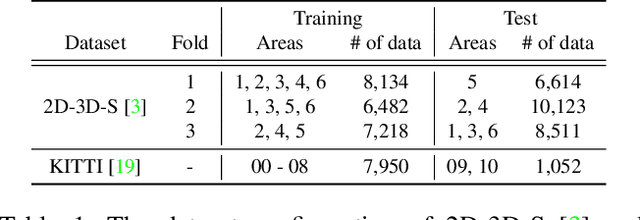
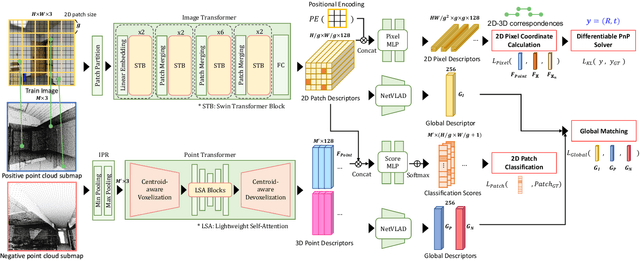
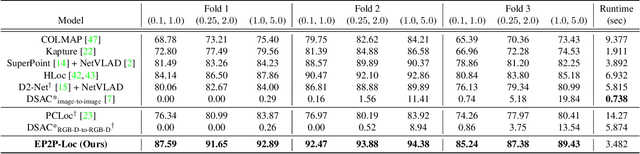
Visual localization is the task of estimating a 6-DoF camera pose of a query image within a provided 3D reference map. Thanks to recent advances in various 3D sensors, 3D point clouds are becoming a more accurate and affordable option for building the reference map, but research to match the points of 3D point clouds with pixels in 2D images for visual localization remains challenging. Existing approaches that jointly learn 2D-3D feature matching suffer from low inliers due to representational differences between the two modalities, and the methods that bypass this problem into classification have an issue of poor refinement. In this work, we propose EP2P-Loc, a novel large-scale visual localization method that mitigates such appearance discrepancy and enables end-to-end training for pose estimation. To increase the number of inliers, we propose a simple algorithm to remove invisible 3D points in the image, and find all 2D-3D correspondences without keypoint detection. To reduce memory usage and search complexity, we take a coarse-to-fine approach where we extract patch-level features from 2D images, then perform 2D patch classification on each 3D point, and obtain the exact corresponding 2D pixel coordinates through positional encoding. Finally, for the first time in this task, we employ a differentiable PnP for end-to-end training. In the experiments on newly curated large-scale indoor and outdoor benchmarks based on 2D-3D-S and KITTI, we show that our method achieves the state-of-the-art performance compared to existing visual localization and image-to-point cloud registration methods.