 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBidirectional GaitNet: A Bidirectional Prediction Model of Human Gait and Anatomical Conditions
Jun 07, 2023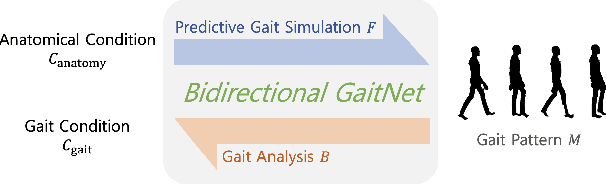
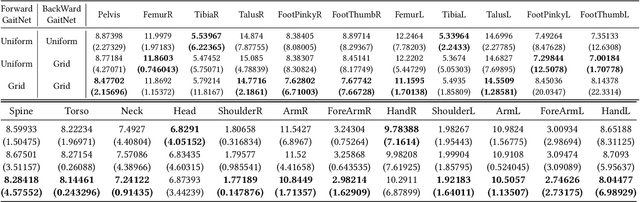
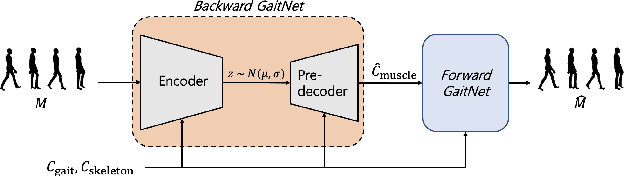
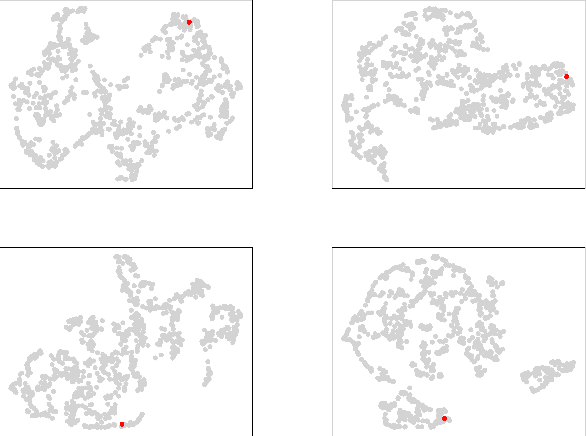
We present a novel generative model, called Bidirectional GaitNet, that learns the relationship between human anatomy and its gait. The simulation model of human anatomy is a comprehensive, full-body, simulation-ready, musculoskeletal model with 304 Hill-type musculotendon units. The Bidirectional GaitNet consists of forward and backward models. The forward model predicts a gait pattern of a person with specific physical conditions, while the backward model estimates the physical conditions of a person when his/her gait pattern is provided. Our simulation-based approach first learns the forward model by distilling the simulation data generated by a state-of-the-art predictive gait simulator and then constructs a Variational Autoencoder (VAE) with the learned forward model as its decoder. Once it is learned its encoder serves as the backward model. We demonstrate our model on a variety of healthy/impaired gaits and validate it in comparison with physical examination data of real patients.
Generative GaitNet
Jan 28, 2022
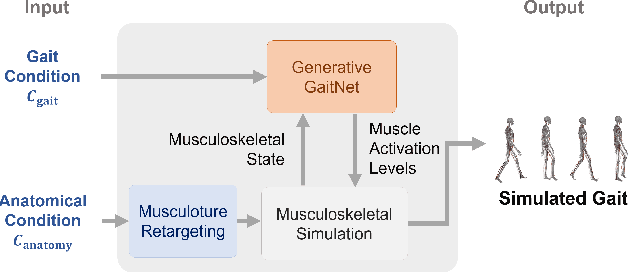
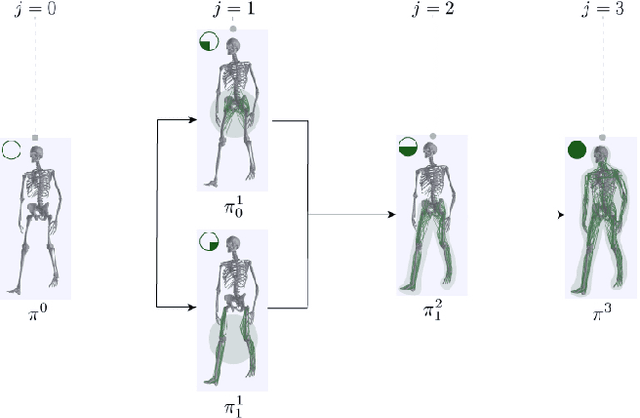
Understanding the relation between anatomy andgait is key to successful predictive gait simulation. Inthis paper, we present Generative GaitNet, which isa novel network architecture based on deep reinforce-ment learning for controlling a comprehensive, full-body, musculoskeletal model with 304 Hill-type mus-culotendons. The Generative Gait is a pre-trained, in-tegrated system of artificial neural networks learnedin a 618-dimensional continuous domain of anatomyconditions (e.g., mass distribution, body proportion,bone deformity, and muscle deficits) and gait condi-tions (e.g., stride and cadence). The pre-trained Gait-Net takes anatomy and gait conditions as input andgenerates a series of gait cycles appropriate to theconditions through physics-based simulation. We willdemonstrate the efficacy and expressive power of Gen-erative GaitNet to generate a variety of healthy andpathologic human gaits in real-time physics-based sim-ulation.