 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Radar Modulation Recognition via a Noise-Aware Ensemble Neural Network
Nov 22, 2024



Electronic warfare support (ES) systems intercept adversary radar signals and estimate various types of signal information, including modulation schemes. The accurate and rapid identification of modulation schemes under conditions of very low signal power remains a significant challenge for ES systems. This paper proposes a recognition model based on a noise-aware ensemble learning (NAEL) framework to efficiently recognize radar modulation schemes in noisy environments. The NAEL framework evaluates the influence of noise on recognition and adaptively selects an appropriate neural network structure, offering significant advantages in terms of computational efficiency and recognition performance. Furthermore, we employ feature extraction blocks to enhance the efficiency of the proposed recognition model. We present the analysis results of the recognition performance of the proposed model based on experimental data. Our recognition model demonstrates superior recognition accuracy with low computational complexity compared to conventional classification models.
RainSD: Rain Style Diversification Module for Image Synthesis Enhancement using Feature-Level Style Distribution
Dec 31, 2023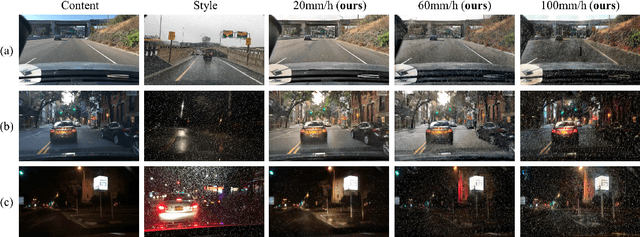
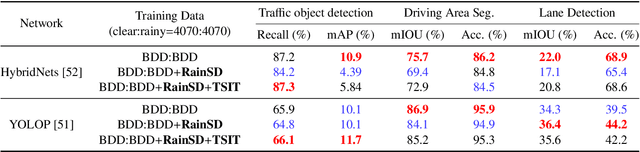
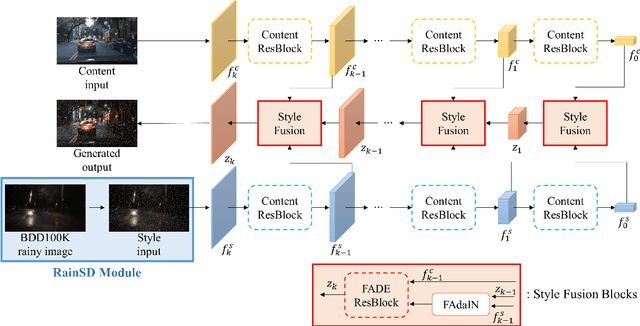

Autonomous driving technology nowadays targets to level 4 or beyond, but the researchers are faced with some limitations for developing reliable driving algorithms in diverse challenges. To promote the autonomous vehicles to spread widely, it is important to address safety issues on this technology. Among various safety concerns, the sensor blockage problem by severe weather conditions can be one of the most frequent threats for multi-task learning based perception algorithms during autonomous driving. To handle this problem, the importance of the generation of proper datasets is becoming more significant. In this paper, a synthetic road dataset with sensor blockage generated from real road dataset BDD100K is suggested in the format of BDD100K annotation. Rain streaks for each frame were made by an experimentally established equation and translated utilizing the image-to-image translation network based on style transfer. Using this dataset, the degradation of the diverse multi-task networks for autonomous driving, such as lane detection, driving area segmentation, and traffic object detection, has been thoroughly evaluated and analyzed. The tendency of the performance degradation of deep neural network-based perception systems for autonomous vehicle has been analyzed in depth. Finally, we discuss the limitation and the future directions of the deep neural network-based perception algorithms and autonomous driving dataset generation based on image-to-image translation.