 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinesthetic-based In-Hand Object Recognition with an Underactuated Robotic Hand
Jan 30, 2024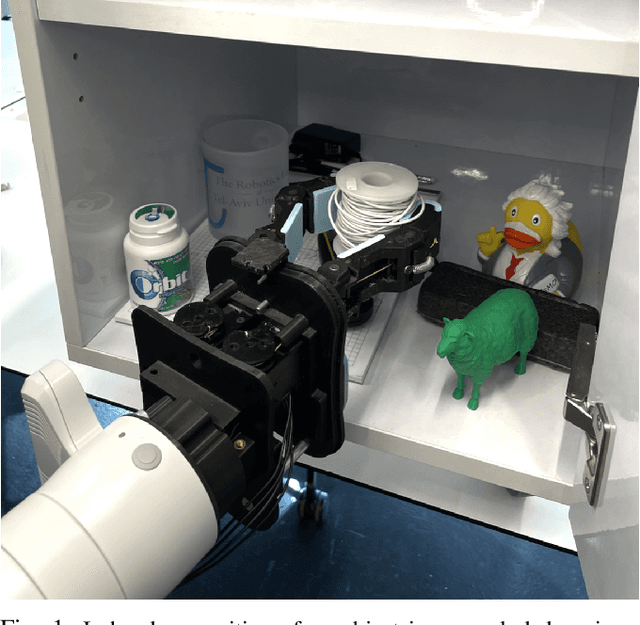


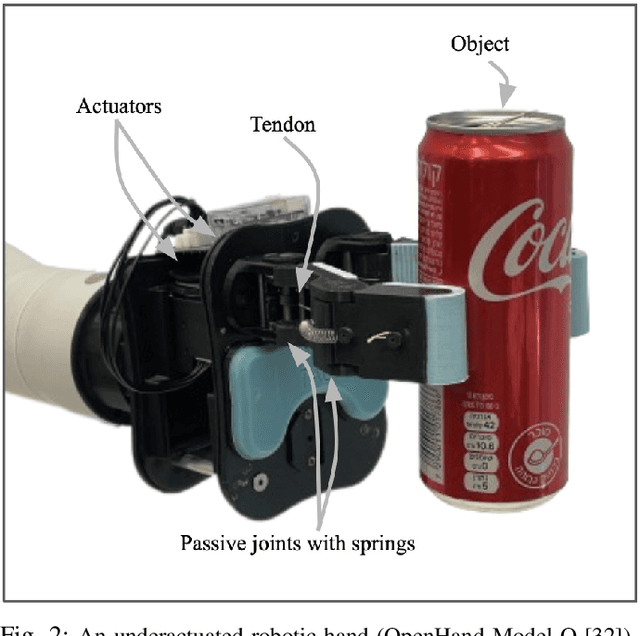
Tendon-based underactuated hands are intended to be simple, compliant and affordable. Often, they are 3D printed and do not include tactile sensors. Hence, performing in-hand object recognition with direct touch sensing is not feasible. Adding tactile sensors can complicate the hardware and introduce extra costs to the robotic hand. Also, the common approach of visual perception may not be available due to occlusions. In this paper, we explore whether kinesthetic haptics can provide in-direct information regarding the geometry of a grasped object during in-hand manipulation with an underactuated hand. By solely sensing actuator positions and torques over a period of time during motion, we show that a classifier can recognize an object from a set of trained ones with a high success rate of almost 95%. In addition, the implementation of a real-time majority vote during manipulation further improves recognition. Additionally, a trained classifier is also shown to be successful in distinguishing between shape categories rather than just specific objects.