 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Multirobot Virtual Structure Control using Dual Quaternions
Apr 07, 2025

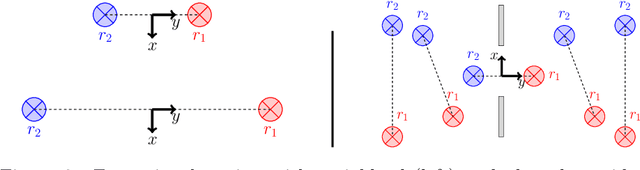

A dual quaternion-based control strategy for formation flying of small UAV groups is proposed. Through the definition of a virtual structure, the coordinated control of formation's position, orientation, and shape parameters is enabled. This abstraction simplifies formation management, allowing a low-level controller to compute commands for individual UAVs. The controller is divided into a pose control module and a geometry-based adaptive strategy, providing efficient and precise task execution. Simulation and experimental results validate the approach.
Propeller damage detection, classification and estimation in multirotor vehicles
Oct 07, 2024This manuscript details an architecture and training methodology for a data-driven framework aimed at detecting, identifying, and quantifying damage in the propeller blades of multirotor Unmanned Aerial Vehicles. By substituting one propeller with a damaged counterpart-encompassing three distinct damage types of varying severity-real flight data was collected. This data was then used to train a composite model, comprising both classifiers and neural networks, capable of accurately identifying the type of failure, estimating damage severity, and pinpointing the affected rotor. The data employed for this analysis was exclusively sourced from inertial measurements and control command inputs, ensuring adaptability across diverse multirotor vehicle platforms.