 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
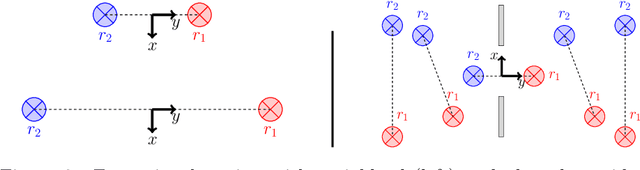
Add to EdgeSubframework-based Bearing Rigidity Maintenance Control in Multirobot Networks
Apr 23, 2025This work presents a novel approach for analyzing and controlling bearing rigidity in multi-robot networks with dynamic topology. By decomposing the system's framework into subframeworks, we express bearing rigidity, a global property, as a set of local properties, with rigidity eigenvalues serving as natural local rigidity metrics. We propose a decentralized, scalable, gradient-based controller that uses only bearing measurements to execute mission-specific commands. The controller preserves bearing rigidity by maintaining rigidity eigenvalues above a threshold, and also avoids inter-robot collisions. Simulations confirm the scheme's effectiveness, with information exchange confined to subframeworks, underscoring its scalability and practicality.
Adaptive Multirobot Virtual Structure Control using Dual Quaternions
Apr 07, 2025


A dual quaternion-based control strategy for formation flying of small UAV groups is proposed. Through the definition of a virtual structure, the coordinated control of formation's position, orientation, and shape parameters is enabled. This abstraction simplifies formation management, allowing a low-level controller to compute commands for individual UAVs. The controller is divided into a pose control module and a geometry-based adaptive strategy, providing efficient and precise task execution. Simulation and experimental results validate the approach.