Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Multirobot Virtual Structure Control using Dual Quaternions
Paper and Code
Apr 07, 2025

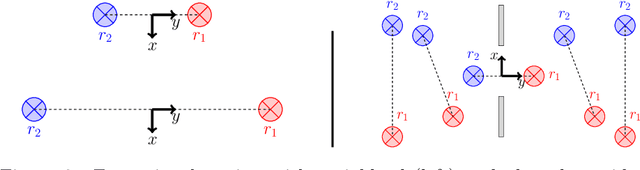

A dual quaternion-based control strategy for formation flying of small UAV groups is proposed. Through the definition of a virtual structure, the coordinated control of formation's position, orientation, and shape parameters is enabled. This abstraction simplifies formation management, allowing a low-level controller to compute commands for individual UAVs. The controller is divided into a pose control module and a geometry-based adaptive strategy, providing efficient and precise task execution. Simulation and experimental results validate the approach.
View paper on