Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNumerical and experimental realization of analytical SLAM
Nov 15, 2019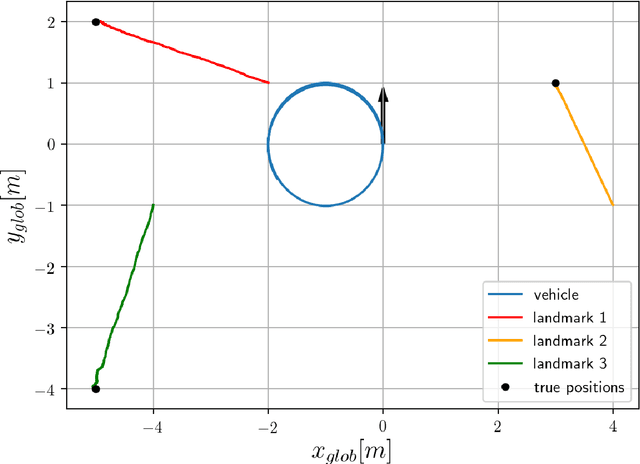

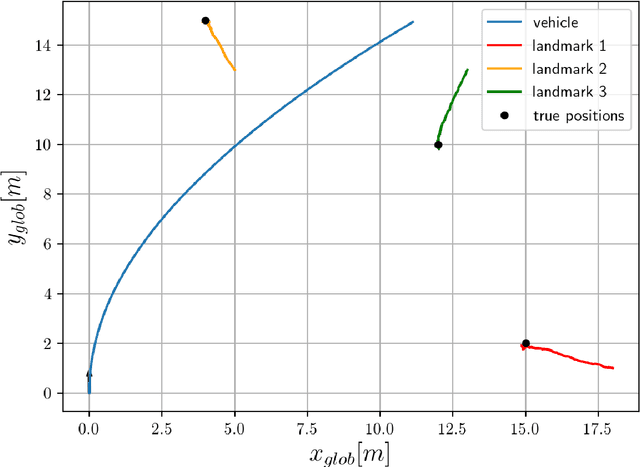
Analytical approach to SLAM problem was introduced in the recent years. In our work we investigate the method numerically with the motivation of using the algorithm in a real hardware experiments. We perform a robustness test of the algorithm and apply it to the robotic hardware in two different setups. In one we try to recover a map of the environment using bearing angle measurements and radial distance measurements. The another setup utilizes only bearing angle information.
* Due to the misunderstanding paper had been submitted before all
authors agreed on the final version
Via