 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAircraft Trajectory Segmentation-based Contrastive Coding: A Framework for Self-supervised Trajectory Representation
Jul 29, 2024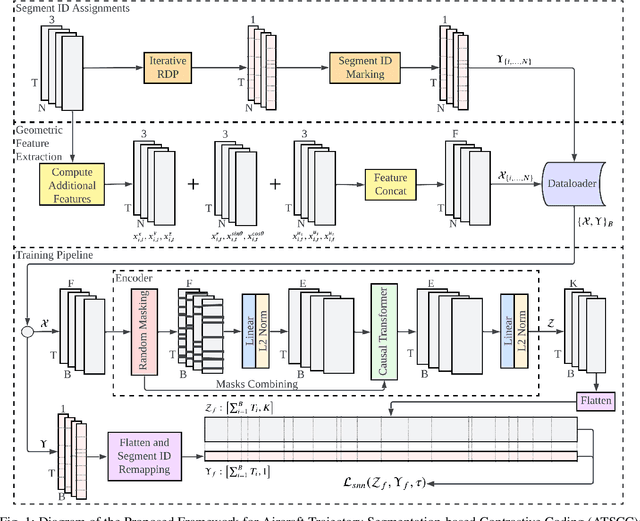
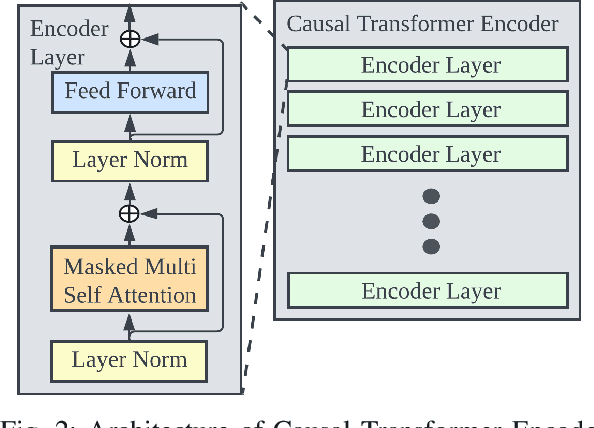
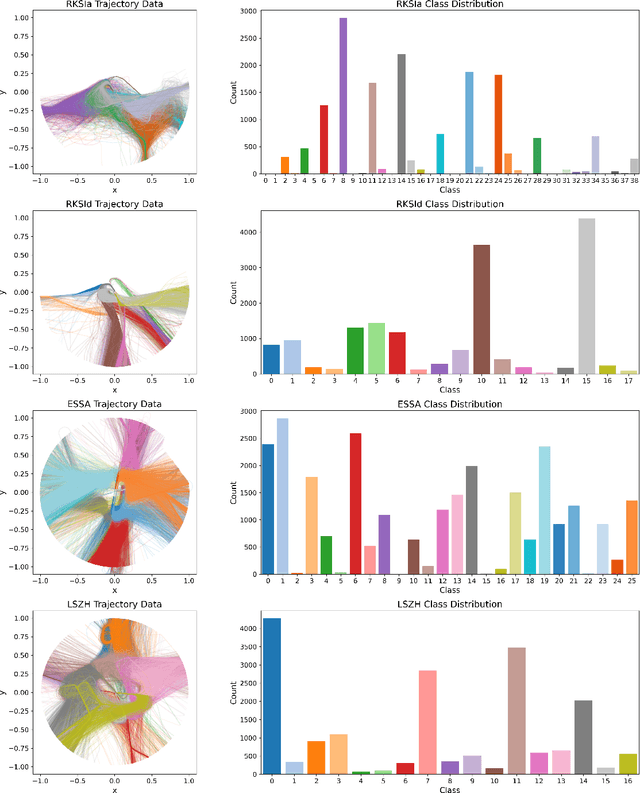
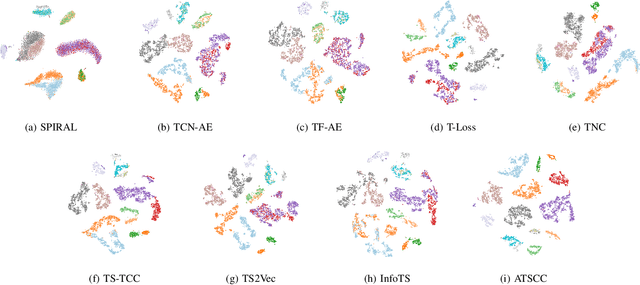
Air traffic trajectory recognition has gained significant interest within the air traffic management community, particularly for fundamental tasks such as classification and clustering. This paper introduces Aircraft Trajectory Segmentation-based Contrastive Coding (ATSCC), a novel self-supervised time series representation learning framework designed to capture semantic information in air traffic trajectory data. The framework leverages the segmentable characteristic of trajectories and ensures consistency within the self-assigned segments. Intensive experiments were conducted on datasets from three different airports, totaling four datasets, comparing the learned representation's performance of downstream classification and clustering with other state-of-the-art representation learning techniques. The results show that ATSCC outperforms these methods by aligning with the labels defined by aeronautical procedures. ATSCC is adaptable to various airport configurations and scalable to incomplete trajectories. This research has expanded upon existing capabilities, achieving these improvements independently without predefined inputs such as airport configurations, maneuvering procedures, or labeled data.
LiCS: Navigation using Learned-imitation on Cluttered Space
Jun 21, 2024



In this letter, we propose a robust and fast navigation system in a narrow indoor environment for UGV (Unmanned Ground Vehicle) using 2D LiDAR and odometry. We used behavior cloning with Transformer neural network to learn the optimization-based baseline algorithm. We inject Gaussian noise during expert demonstration to increase the robustness of learned policy. We evaluate the performance of LiCS using both simulation and hardware experiments. It outperforms all other baselines in terms of navigation performance and can maintain its robust performance even on highly cluttered environments. During the hardware experiments, LiCS can maintain safe navigation at maximum speed of $1.5\ m/s$.