 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiCS: Navigation using Learned-imitation on Cluttered Space
Jun 21, 2024



In this letter, we propose a robust and fast navigation system in a narrow indoor environment for UGV (Unmanned Ground Vehicle) using 2D LiDAR and odometry. We used behavior cloning with Transformer neural network to learn the optimization-based baseline algorithm. We inject Gaussian noise during expert demonstration to increase the robustness of learned policy. We evaluate the performance of LiCS using both simulation and hardware experiments. It outperforms all other baselines in terms of navigation performance and can maintain its robust performance even on highly cluttered environments. During the hardware experiments, LiCS can maintain safe navigation at maximum speed of $1.5\ m/s$.
Dynamical prediction of two meteorological factors using the deep neural network and the long short-term memory $(2)$
Apr 28, 2021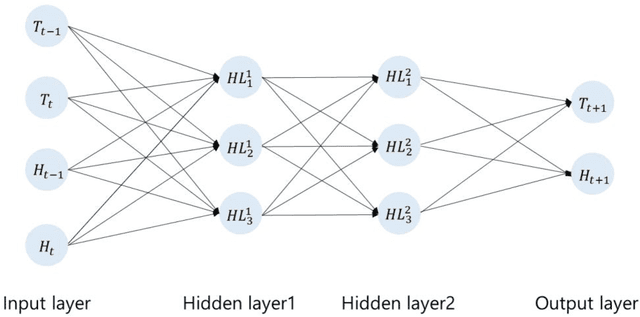
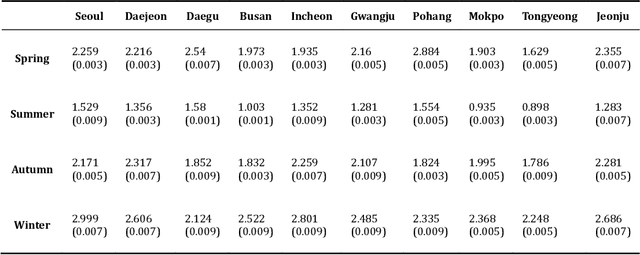
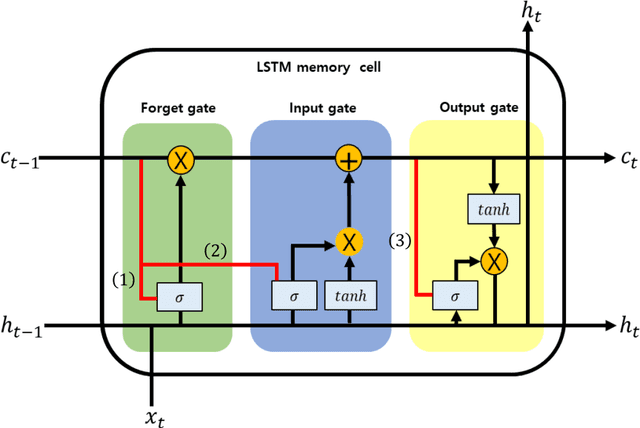
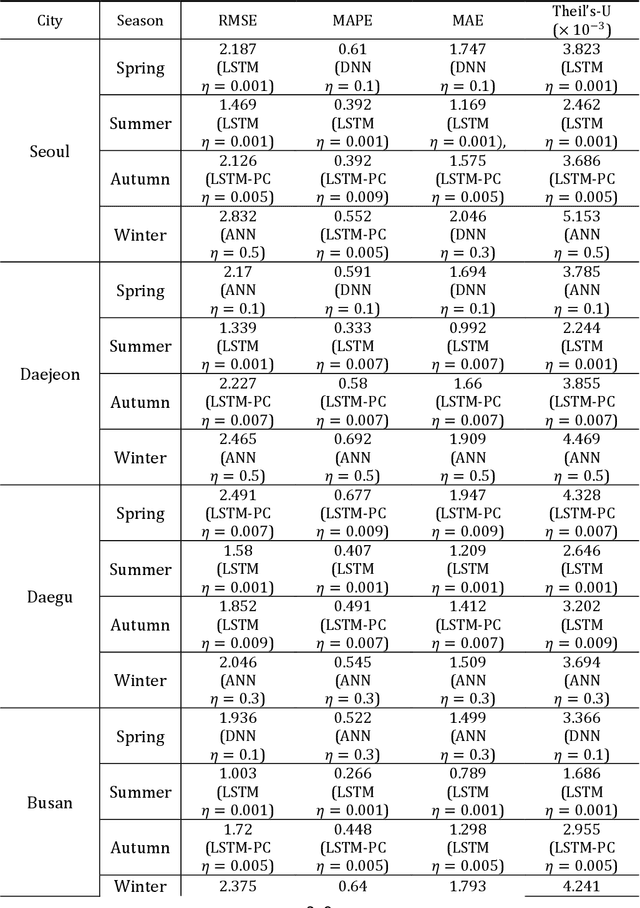
This paper presents the predictive accuracy using two-variate meteorological factors, average temperature and average humidity, in neural network algorithms. We analyze result in five learning architectures such as the traditional artificial neural network, deep neural network, and extreme learning machine, long short-term memory, and long-short-term memory with peephole connections, after manipulating the computer-simulation. Our neural network modes are trained on the daily time-series dataset during seven years (from 2014 to 2020). From the trained results for 2500, 5000, and 7500 epochs, we obtain the predicted accuracies of the meteorological factors produced from outputs in ten metropolitan cities (Seoul, Daejeon, Daegu, Busan, Incheon, Gwangju, Pohang, Mokpo, Tongyeong, and Jeonju). The error statistics is found from the result of outputs, and we compare these values to each other after the manipulation of five neural networks. As using the long-short-term memory model in testing 1 (the average temperature predicted from the input layer with six input nodes), Tonyeong has the lowest root mean squared error (RMSE) value of 0.866 $(%)$ in summer from the computer-simulation in order to predict the temperature. To predict the humidity, the RMSE is shown the lowest value of 5.732 $(%)$, when using the long short-term memory model in summer in Mokpo in testing 2 (the average humidity predicted from the input layer with six input nodes). Particularly, the long short-term memory model is is found to be more accurate in forecasting daily levels than other neural network models in temperature and humidity forecastings. Our result may provide a computer-simuation basis for the necessity of exploring and develping a novel neural network evaluation method in the future.