 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTEAM: Trilateration for Exploration and Mapping with Robotic Networks
Jul 08, 2020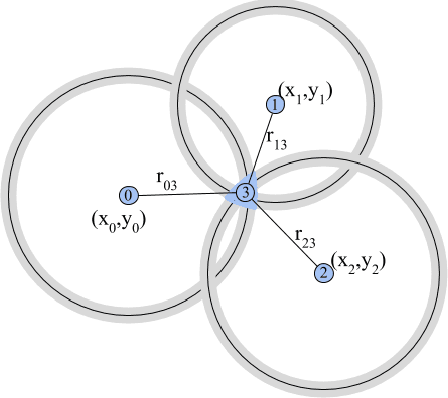
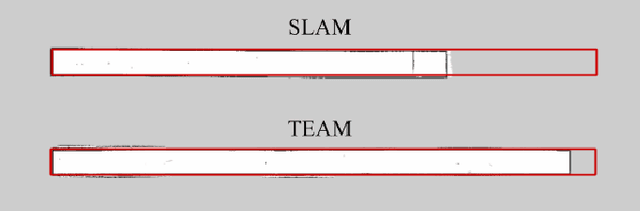
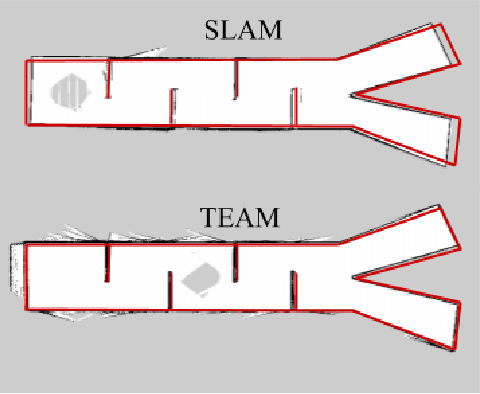
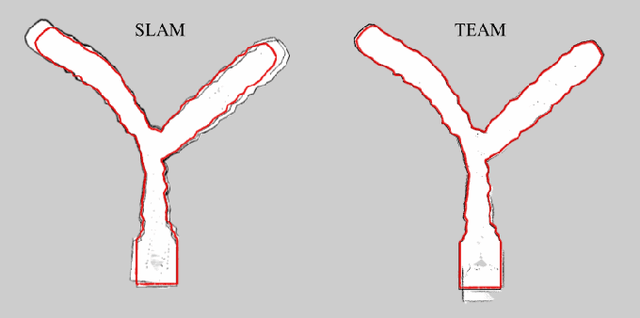
Localization and mapping are often considered simultaneously; however, the use of robotic networks in unknown environment exploration motivates a fundamentally different approach in which robots can act as both mobile agents and instantaneous anchors in a cooperative positioning system. We present Trilateration for Exploration and Mapping (TEAM), a novel algorithm for creating maps of unknown environments with a network of mobile robots. TEAM is designed to leverage the capability of commercially-available ultra-wideband (UWB) radios to provide range estimates with centimeter accuracy and perform anchorless localization in a shared, stationary frame. We provide experimental results in varied Gazebo simulation environments as well as on a testbed of Turtlebot3 Burgers with Pozyx UWB radios. We compare TEAM to the popular Rao-Blackwellized Particle Filter for Simultaneous Localization and Mapping (SLAM). We demonstrate that TEAM (1) reduces the maximum localization error by 50\% (2) requires an order of magnitude less computational complexity (3) reduces the necessary sample rate of LiDAR measurements by an order of magnitude and (4) achieves up to a 28\% increase in map accuracy in feature-deprived environments and comparable map accuracy in other settings.