 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Better Test Coverage: Merging Unit Tests for Autonomous Systems
Apr 06, 2022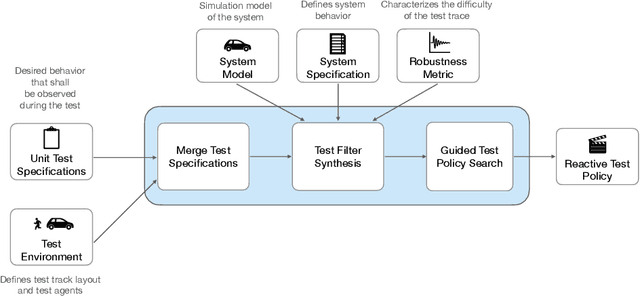
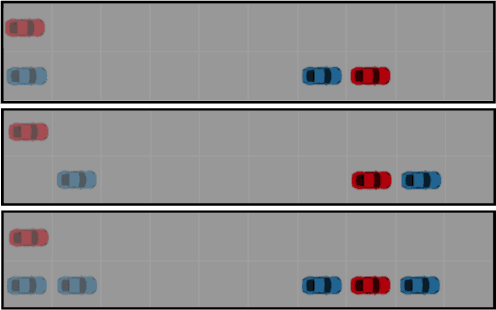
We present a framework for merging unit tests for autonomous systems. Typically, it is intractable to test an autonomous system for every scenario in its operating environment. The question of whether it is possible to design a single test for multiple requirements of the system motivates this work. First, we formally define three attributes of a test: a test specification that characterizes behaviors observed in a test execution, a test environment, and a test policy. Using the merge operator from contract-based design theory, we provide a formalism to construct a merged test specification from two unit test specifications. Temporal constraints on the merged test specification guarantee that non-trivial satisfaction of both unit test specifications is necessary for a successful merged test execution. We assume that the test environment remains the same across the unit tests and the merged test. Given a test specification and a test environment, we synthesize a test policy filter using a receding horizon approach, and use the test policy filter to guide a search procedure (e.g. Monte-Carlo Tree Search) to find a test policy that is guaranteed to satisfy the test specification. This search procedure finds a test policy that maximizes a pre-defined robustness metric for the test while the filter guarantees a test policy for satisfying the test specification. We prove that our algorithm is sound. Furthermore, the receding horizon approach to synthesizing the filter ensures that our algorithm is scalable. Finally, we show that merging unit tests is impactful for designing efficient test campaigns to achieve similar levels of coverage in fewer test executions. We illustrate our framework on two self-driving examples in a discrete-state setting.
* Conference Paper