 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Follow-the-Leader Strategy using Hierarchical Deep Neural Networks with Grouped Convolutions
Nov 04, 2020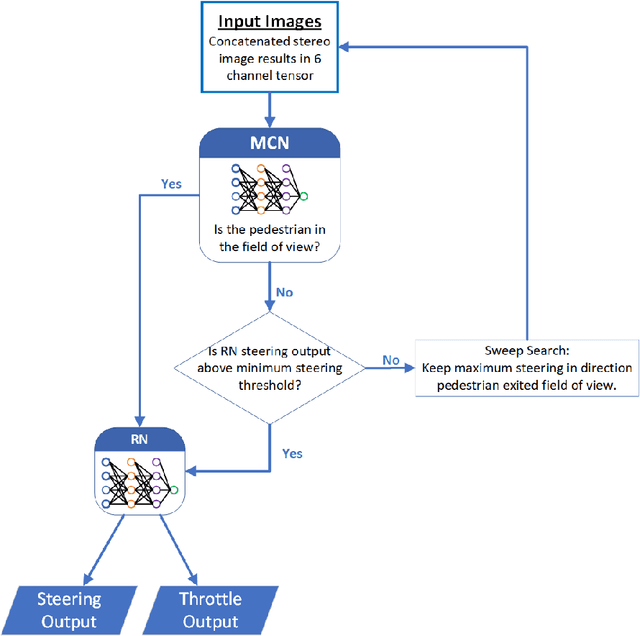
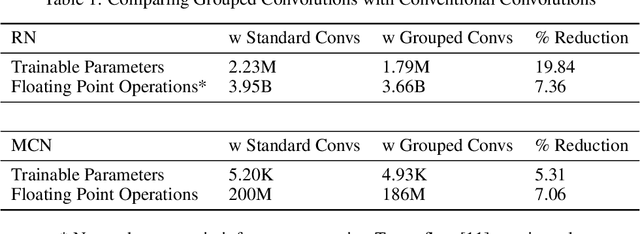
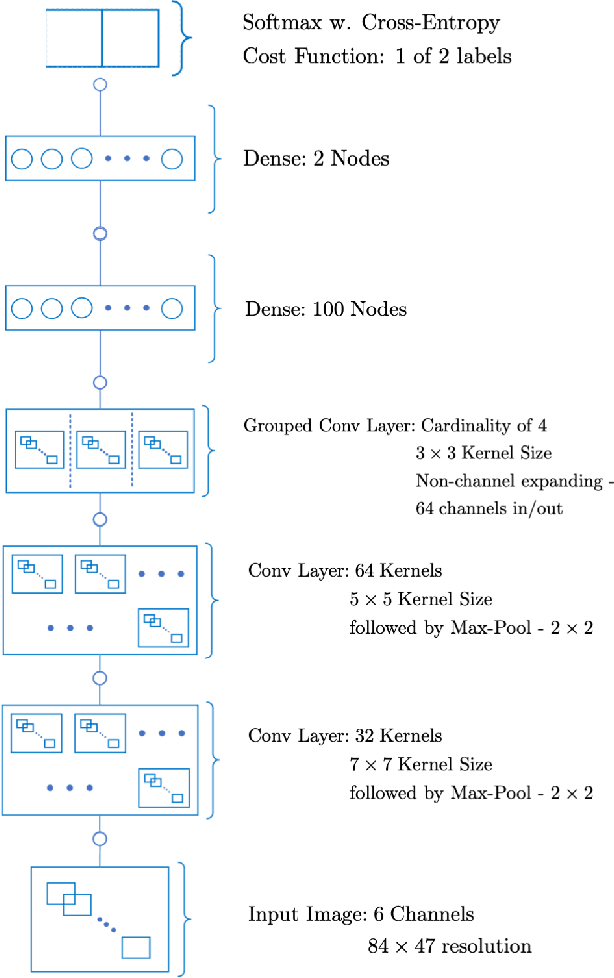

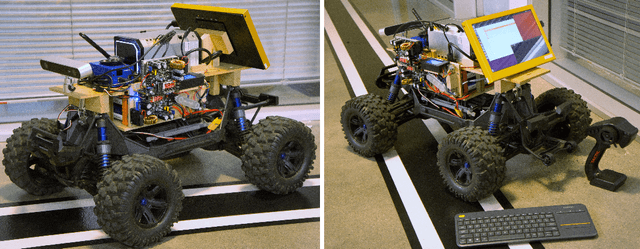
The task of following-the-leader is implemented using a hierarchical Deep Neural Network (DNN) end-to-end driving model to match the direction and speed of a target pedestrian. The model uses a classifier DNN to determine if the pedestrian is within the field of view of the camera sensor. If the pedestrian is present, the image stream from the camera is fed to a regression DNN which simultaneously adjusts the autonomous vehicle's steering and throttle to keep cadence with the pedestrian. If the pedestrian is not visible, the vehicle uses a straightforward exploratory search strategy to reacquire the tracking objective. The classifier and regression DNNs incorporate grouped convolutions to boost model performance as well as to significantly reduce parameter count and compute latency. The models are trained on the Intelligence Processing Unit (IPU) to leverage its fine-grain compute capabilities in order to minimize time-to-train. The results indicate very robust tracking behavior on the part of the autonomous vehicle in terms of its steering and throttle profiles, which required minimal data collection to produce. The throughput in terms of processing training samples has been boosted by the use of the IPU in conjunction with grouped convolutions by a factor ${\sim}3.5$ for training of the classifier and a factor of ${\sim}7$ for the regression network. A recording of the vehicle tracking a pedestrian has been produced and is available on the web.
Hierarchical Multi-task Deep Neural Network Architecture for End-to-End Driving
Feb 09, 2019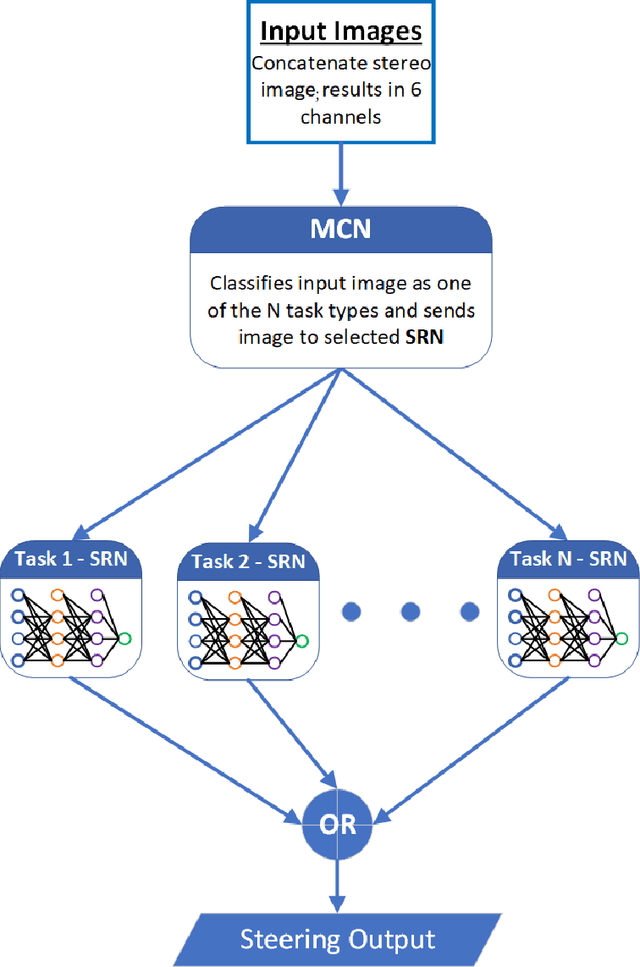
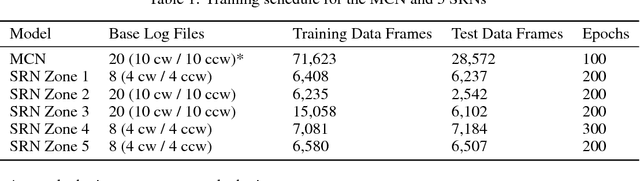
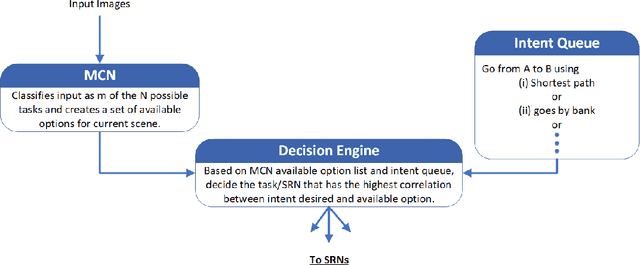
A novel hierarchical Deep Neural Network (DNN) model is presented to address the task of end-to-end driving. The model consists of a master classifier network which determines the driving task required from an input stereo image and directs said image to one of a set of subservient network regression models that perform inference and output a steering command. These subservient networks are designed and trained for a specific driving task: straightaway, swerve maneuver, tight turn, gradual turn, and chicane. Using this modular network strategy allows for two primary advantages: an overall reduction in the amount of data required to train the complete system, and for model tailoring where more complex models can be used for more challenging tasks while simplified networks can handle more mundane tasks. It is this latter facet of the model that makes the approach attractive to a number of applications beyond the current vehicle steering strategy.