 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Multi-task Deep Neural Network Architecture for End-to-End Driving
Paper and Code
Feb 09, 2019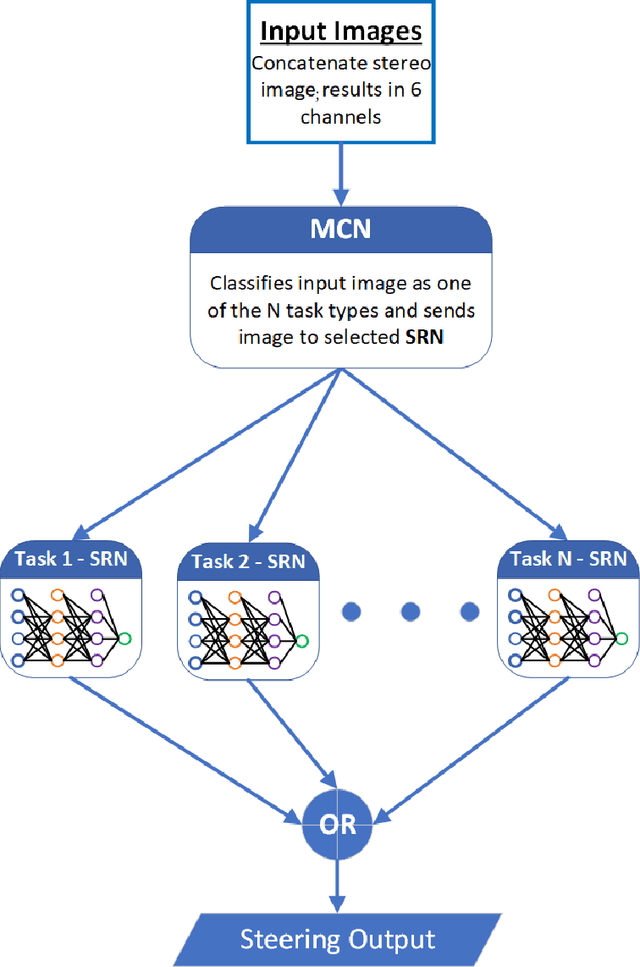
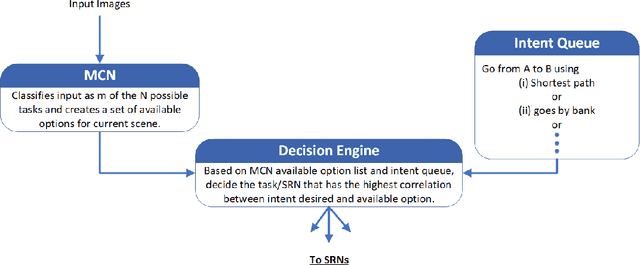
A novel hierarchical Deep Neural Network (DNN) model is presented to address the task of end-to-end driving. The model consists of a master classifier network which determines the driving task required from an input stereo image and directs said image to one of a set of subservient network regression models that perform inference and output a steering command. These subservient networks are designed and trained for a specific driving task: straightaway, swerve maneuver, tight turn, gradual turn, and chicane. Using this modular network strategy allows for two primary advantages: an overall reduction in the amount of data required to train the complete system, and for model tailoring where more complex models can be used for more challenging tasks while simplified networks can handle more mundane tasks. It is this latter facet of the model that makes the approach attractive to a number of applications beyond the current vehicle steering strategy.