Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Convolutional Network for Multi-Target Multi-Camera Vehicle Tracking
Nov 28, 2022
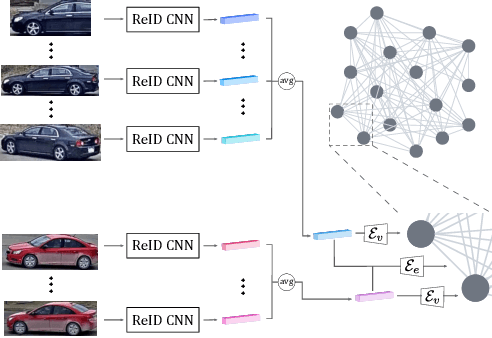
This letter focuses on the task of Multi-Target Multi-Camera vehicle tracking. We propose to associate single-camera trajectories into multi-camera global trajectories by training a Graph Convolutional Network. Our approach simultaneously processes all cameras providing a global solution, and it is also robust to large cameras unsynchronizations. Furthermore, we design a new loss function to deal with class imbalance. Our proposal outperforms the related work showing better generalization and without requiring ad-hoc manual annotations or thresholds, unlike compared approaches.
Via