 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Embedding Clustering for Occlusion Robust Head Pose Estimation
Mar 29, 2024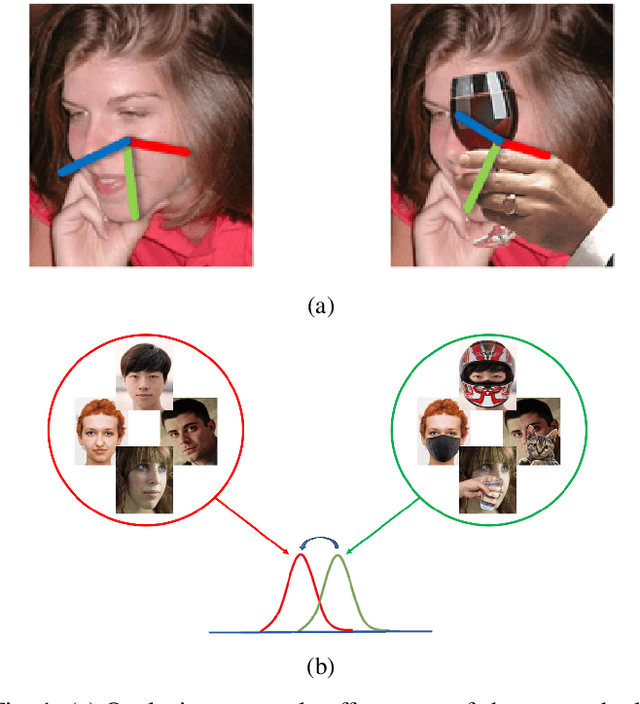
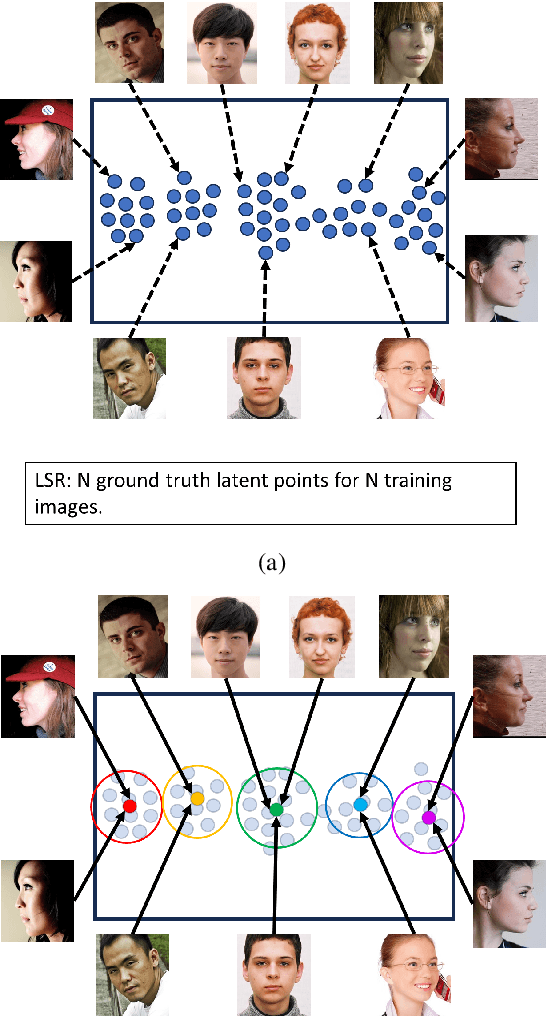
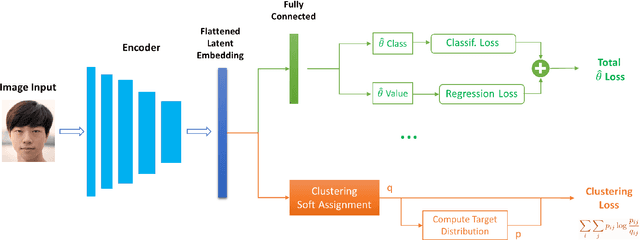
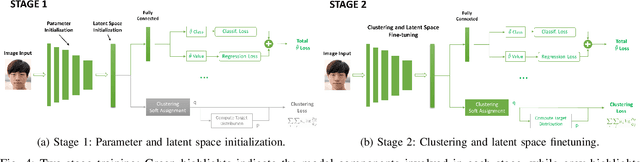
Head pose estimation has become a crucial area of research in computer vision given its usefulness in a wide range of applications, including robotics, surveillance, or driver attention monitoring. One of the most difficult challenges in this field is managing head occlusions that frequently take place in real-world scenarios. In this paper, we propose a novel and efficient framework that is robust in real world head occlusion scenarios. In particular, we propose an unsupervised latent embedding clustering with regression and classification components for each pose angle. The model optimizes latent feature representations for occluded and non-occluded images through a clustering term while improving fine-grained angle predictions. Experimental evaluation on in-the-wild head pose benchmark datasets reveal competitive performance in comparison to state-of-the-art methodologies with the advantage of having a significant data reduction. We observe a substantial improvement in occluded head pose estimation. Also, an ablation study is conducted to ascertain the impact of the clustering term within our proposed framework.
2D Image head pose estimation via latent space regression under occlusion settings
Nov 10, 2023Head orientation is a challenging Computer Vision problem that has been extensively researched having a wide variety of applications. However, current state-of-the-art systems still underperform in the presence of occlusions and are unreliable for many task applications in such scenarios. This work proposes a novel deep learning approach for the problem of head pose estimation under occlusions. The strategy is based on latent space regression as a fundamental key to better structure the problem for occluded scenarios. Our model surpasses several state-of-the-art methodologies for occluded HPE, and achieves similar accuracy for non-occluded scenarios. We demonstrate the usefulness of the proposed approach with: (i) two synthetically occluded versions of the BIWI and AFLW2000 datasets, (ii) real-life occlusions of the Pandora dataset, and (iii) a real-life application to human-robot interaction scenarios where face occlusions often occur. Specifically, the autonomous feeding from a robotic arm.