 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCategorized Grid and Unknown Space Causes for LiDAR-based Dynamic Occupancy Grids
Jul 02, 2024Occupancy Grids have been widely used for perception of the environment as they allow to model the obstacles in the scene, as well as free and unknown space. Recently, there has been a growing interest in the unknown space due to the necessity of better understanding the situation. Although Occupancy Grids have received numerous extensions over the years to address emerging needs, currently, few works go beyond the delimitation of the unknown space area and seek to incorporate additional information. This work builds upon the already well-established LiDAR-based Dynamic Occupancy Grid to introduce a complementary Categorized Grid that conveys its estimation using semantic labels while adding new insights into the possible causes of unknown space. The proposed categorization first divides the space by occupancy and then further categorizes the occupied and unknown space. Occupied space is labeled based on its dynamic state and reliability, while the unknown space is labeled according to its possible causes, whether they stem from the perception system's inherent constraints, limitations induced by the environment, or other causes. The proposed Categorized Grid is showcased in real-world scenarios demonstrating its usefulness for better situation understanding.
Integrating occlusion awareness in urban motion prediction for enhanced autonomous vehicle navigation
Jun 28, 2024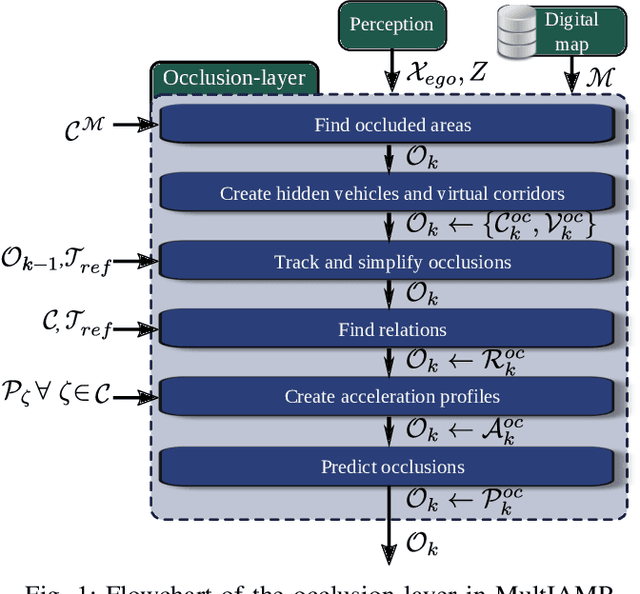
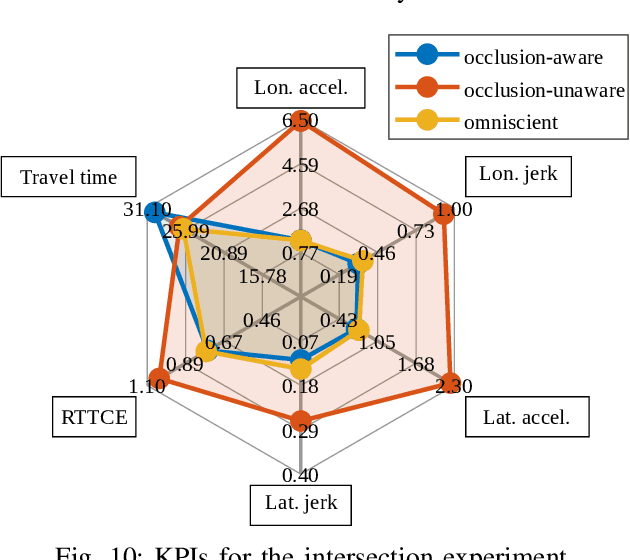
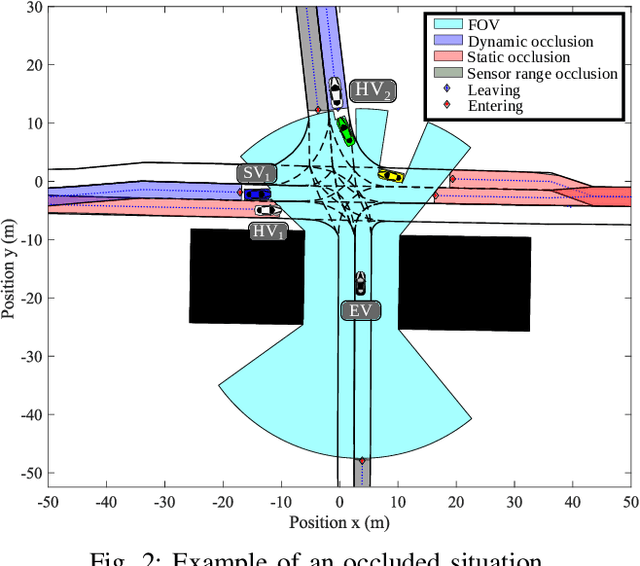
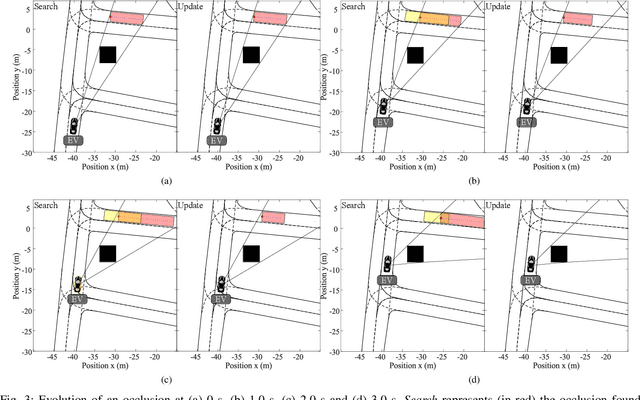
Motion prediction is a key factor towards the full deployment of autonomous vehicles. It is fundamental in order to ensure safety while navigating through highly interactive and complex scenarios. Lack of visibility due to an obstructed view or sensor range poses a great safety issue for autonomous vehicles. The inclusion of occlusion in interaction-aware approaches is not very well explored in the literature. In this work, the MultIAMP framework, which produces multimodal probabilistic outputs from the integration of a Dynamic Bayesian Network and Markov chains, is extended to tackle occlusions. The framework is evaluated with a state-of-the-art motion planner in two realistic use cases.
Lateral control for autonomous vehicles: A comparative evaluation
Nov 14, 2023
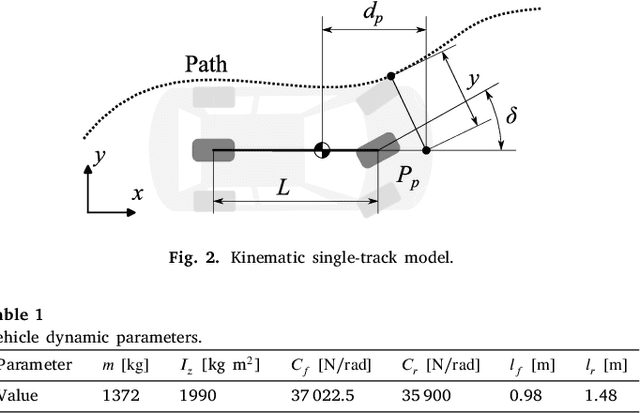

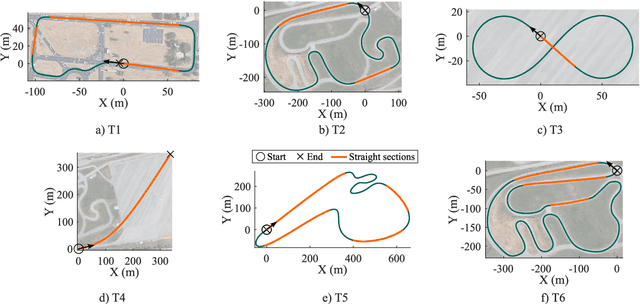
The selection of an appropriate control strategy is essential for ensuring safe operation in autonomous driving. While numerous control strategies have been developed for specific driving scenarios, a comprehensive comparative assessment of their performance using the same tuning methodology is lacking in the literature. This paper addresses this gap by presenting a systematic evaluation of state-of-the-art model-free and model-based control strategies. The objective is to evaluate and contrast the performance of these controllers across a wide range of driving scenarios, reflecting the diverse needs of autonomous vehicles. To facilitate the comparative analysis, a comprehensive set of performance metrics is selected, encompassing accuracy, robustness, and comfort. The contributions of this research include the design of a systematic tuning methodology, the use of two novel metrics for stability and comfort comparisons and the evaluation through extensive simulations and real tests in an experimental instrumented vehicle over a wide range of trajectories.
* Video showcasing a real-world test of a model-free lateral controller in an automated vehicle: https://youtu.be/JtLfZzEdGC8
Learning-enabled multi-modal motion prediction in urban environments
Apr 23, 2023



Motion prediction is a key factor towards the full deployment of autonomous vehicles. It is fundamental in order to assure safety while navigating through highly interactive complex scenarios. In this work, the framework IAMP (Interaction- Aware Motion Prediction), producing multi-modal probabilistic outputs from the integration of a Dynamic Bayesian Network and Markov Chains, is extended with a learning-based approach. The integration of a machine learning model tackles the limitations of the ruled-based mechanism since it can better adapt to different driving styles and driving situations. The method here introduced generates context-dependent acceleration distributions used in a Markov-chain-based motion prediction. This hybrid approach results in better evaluation metrics when compared with the baseline in the four