Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating occlusion awareness in urban motion prediction for enhanced autonomous vehicle navigation
Paper and Code
Jun 28, 2024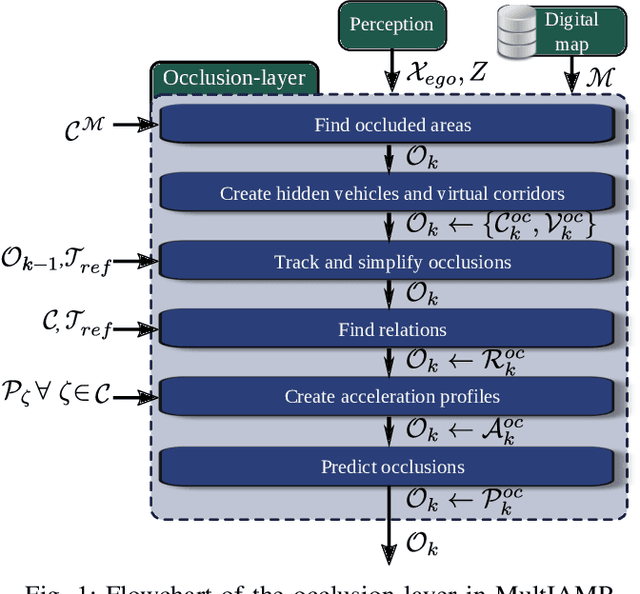
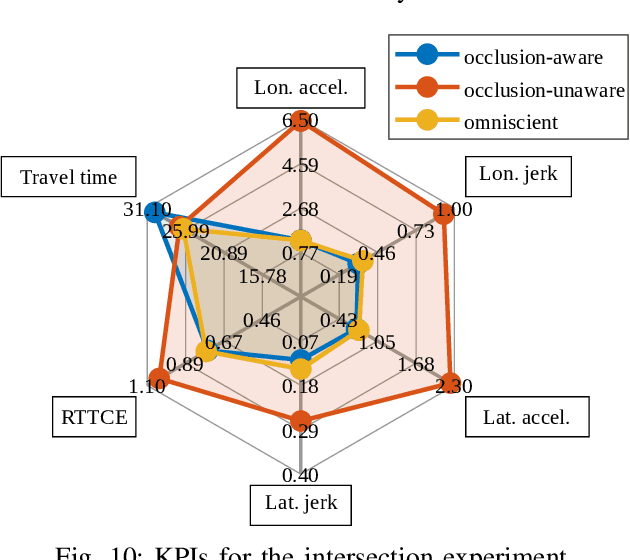
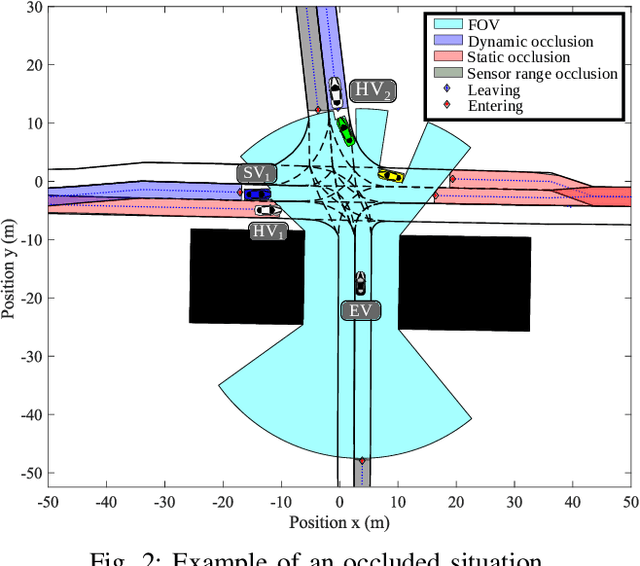
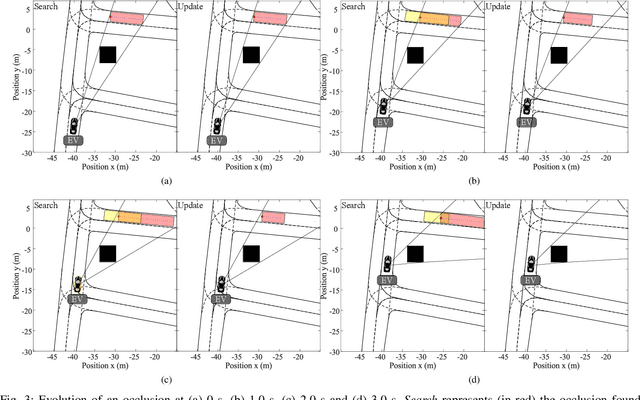
Motion prediction is a key factor towards the full deployment of autonomous vehicles. It is fundamental in order to ensure safety while navigating through highly interactive and complex scenarios. Lack of visibility due to an obstructed view or sensor range poses a great safety issue for autonomous vehicles. The inclusion of occlusion in interaction-aware approaches is not very well explored in the literature. In this work, the MultIAMP framework, which produces multimodal probabilistic outputs from the integration of a Dynamic Bayesian Network and Markov chains, is extended to tackle occlusions. The framework is evaluated with a state-of-the-art motion planner in two realistic use cases.
View paper on