Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClone Swarms: Learning to Predict and Control Multi-Robot Systems by Imitation
Dec 05, 2019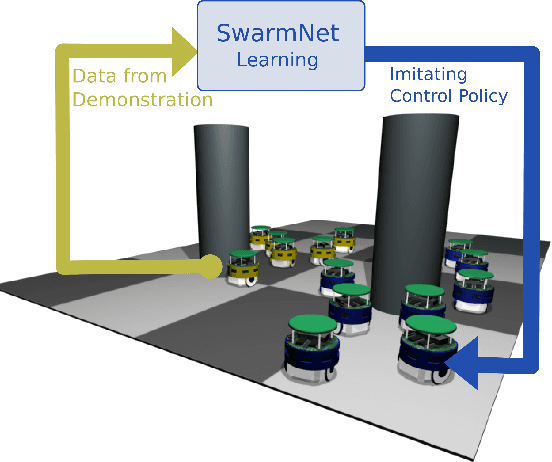
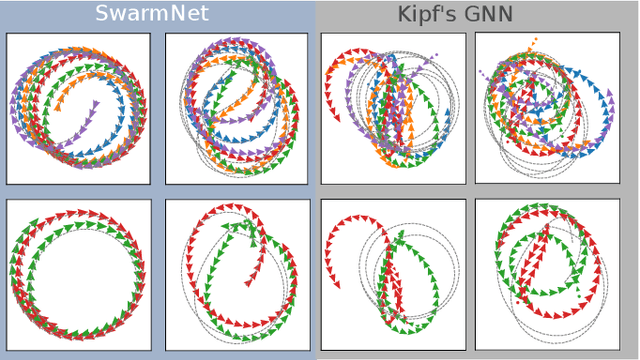
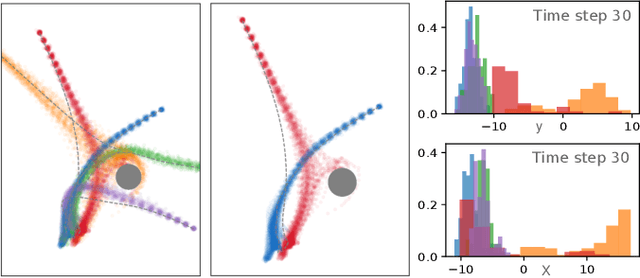
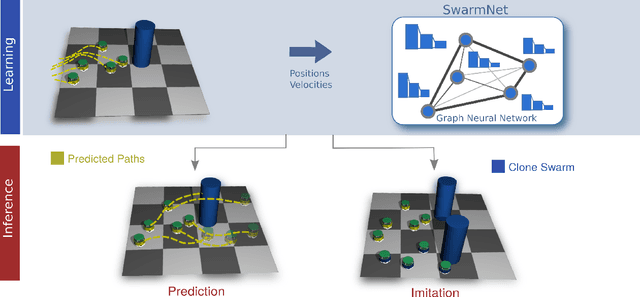
In this paper, we propose SwarmNet -- a neural network architecture that can learn to predict and imitate the behavior of an observed swarm of agents in a centralized manner. Tested on artificially generated swarm motion data, the network achieves high levels of prediction accuracy and imitation authenticity. We compare our model to previous approaches for modelling interaction systems and show how modifying components of other models gradually approaches the performance of ours. Finally, we also discuss an extension of SwarmNet that can deal with nondeterministic, noisy, and uncertain environments, as often found in robotics applications.
Via