 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing LLMs for Explaining Sets of Counterfactual Examples to Final Users
Aug 27, 2024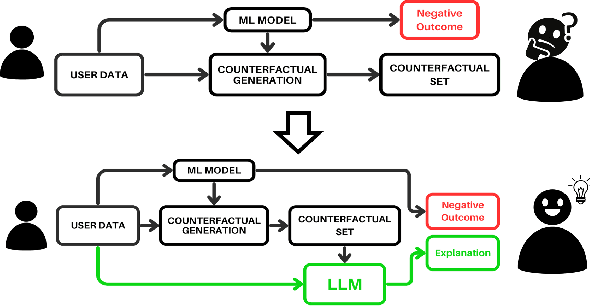


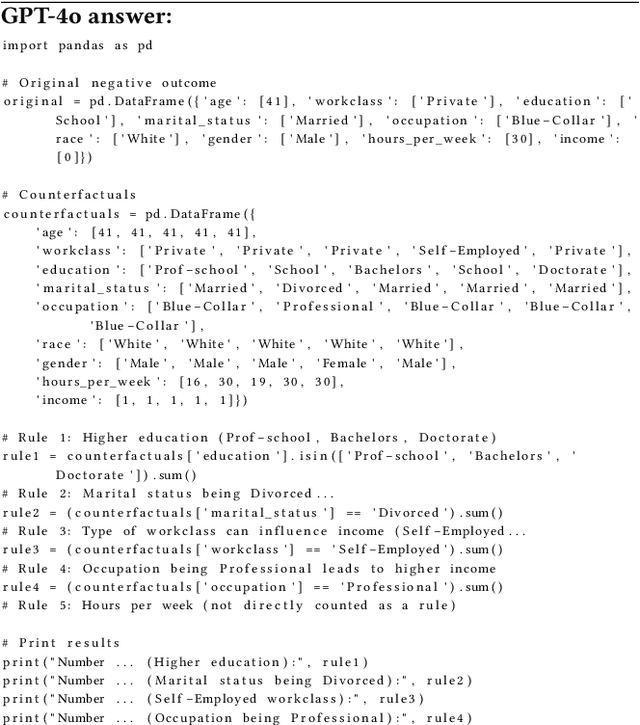
Causality is vital for understanding true cause-and-effect relationships between variables within predictive models, rather than relying on mere correlations, making it highly relevant in the field of Explainable AI. In an automated decision-making scenario, causal inference methods can analyze the underlying data-generation process, enabling explanations of a model's decision by manipulating features and creating counterfactual examples. These counterfactuals explore hypothetical scenarios where a minimal number of factors are altered, providing end-users with valuable information on how to change their situation. However, interpreting a set of multiple counterfactuals can be challenging for end-users who are not used to analyzing raw data records. In our work, we propose a novel multi-step pipeline that uses counterfactuals to generate natural language explanations of actions that will lead to a change in outcome in classifiers of tabular data using LLMs. This pipeline is designed to guide the LLM through smaller tasks that mimic human reasoning when explaining a decision based on counterfactual cases. We conducted various experiments using a public dataset and proposed a method of closed-loop evaluation to assess the coherence of the final explanation with the counterfactuals, as well as the quality of the content. Results are promising, although further experiments with other datasets and human evaluations should be carried out.
Object Segmentation of Cluttered Airborne LiDAR Point Clouds
Oct 28, 2022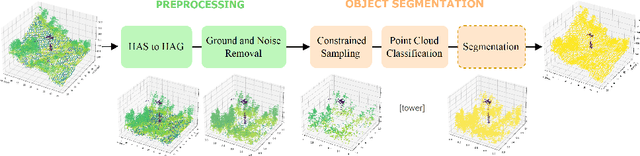
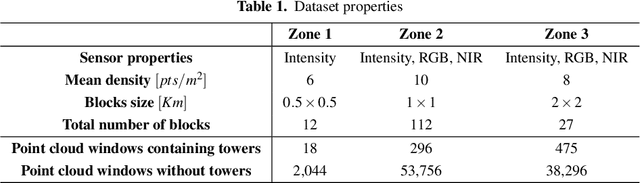

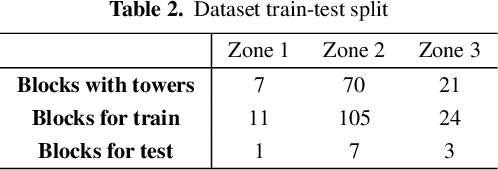
Airborne topographic LiDAR is an active remote sensing technology that emits near-infrared light to map objects on the Earth's surface. Derived products of LiDAR are suitable to service a wide range of applications because of their rich three-dimensional spatial information and their capacity to obtain multiple returns. However, processing point cloud data still requires a significant effort in manual editing. Certain human-made objects are difficult to detect because of their variety of shapes, irregularly-distributed point clouds, and low number of class samples. In this work, we propose an end-to-end deep learning framework to automatize the detection and segmentation of objects defined by an arbitrary number of LiDAR points surrounded by clutter. Our method is based on a light version of PointNet that achieves good performance on both object recognition and segmentation tasks. The results are tested against manually delineated power transmission towers and show promising accuracy.
* proceedings of the 24th International Conference of the Catalan Association for Artificial Intelligence (CCIA 2022)