 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Tracking for Collision Avoidance Using Multiple Cameras in Open RAN Networks
Apr 09, 2025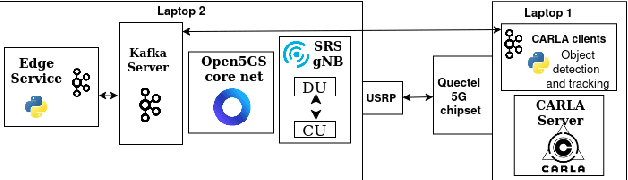
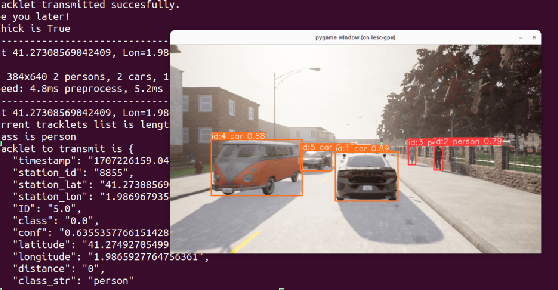
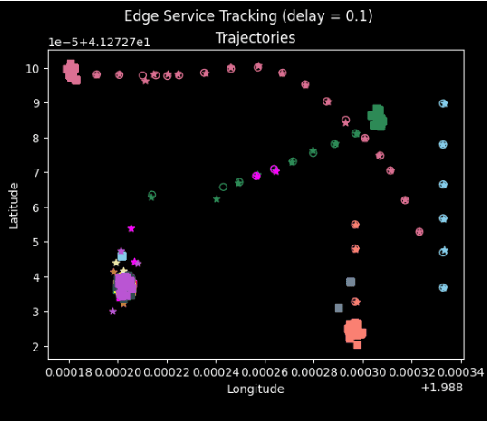
This paper deals with the multi-object detection and tracking problem, within the scope of open Radio Access Network (RAN), for collision avoidance in vehicular scenarios. To this end, a set of distributed intelligent agents collocated with cameras are considered. The fusion of detected objects is done at an edge service, considering Open RAN connectivity. Then, the edge service predicts the objects trajectories for collision avoidance. Compared to the related work a more realistic Open RAN network is implemented and multiple cameras are used.
Enhancing 5G O-RAN Communication Efficiency Through AI-Based Latency Forecasting
Feb 25, 2025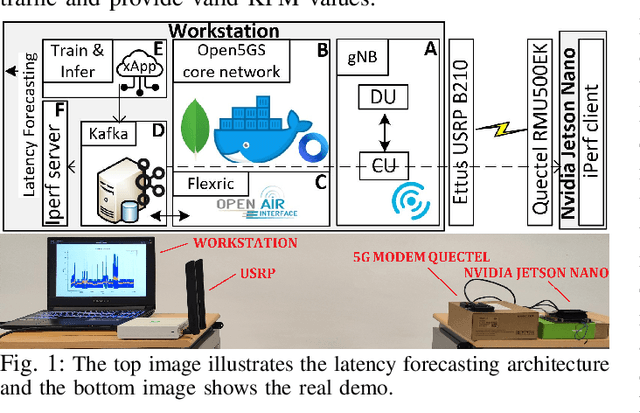
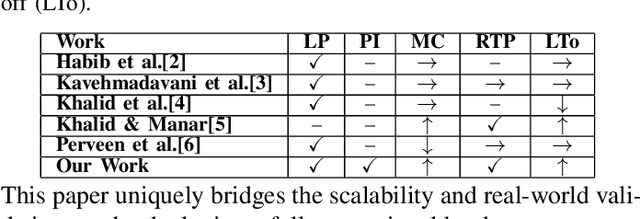
The increasing complexity and dynamic nature of 5G open radio access networks (O-RAN) pose significant challenges to maintaining low latency, high throughput, and resource efficiency. While existing methods leverage machine learning for latency prediction and resource management, they often lack real-world scalability and hardware validation. This paper addresses these limitations by presenting an artificial intelligence-driven latency forecasting system integrated into a functional O-RAN prototype. The system uses a bidirectional long short-term memory model to predict latency in real time within a scalable, open-source framework built with FlexRIC. Experimental results demonstrate the model's efficacy, achieving a loss metric below 0.04, thus validating its applicability in dynamic 5G environments.