Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Tracking for Collision Avoidance Using Multiple Cameras in Open RAN Networks
Paper and Code
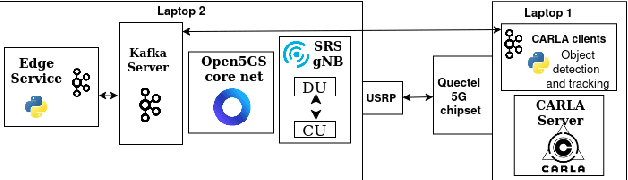
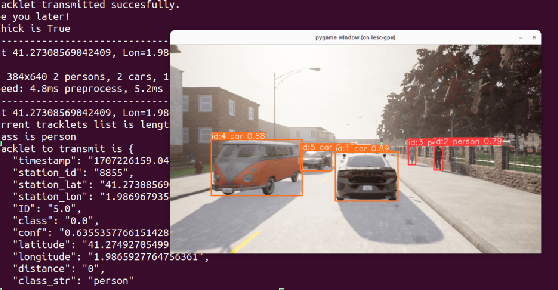
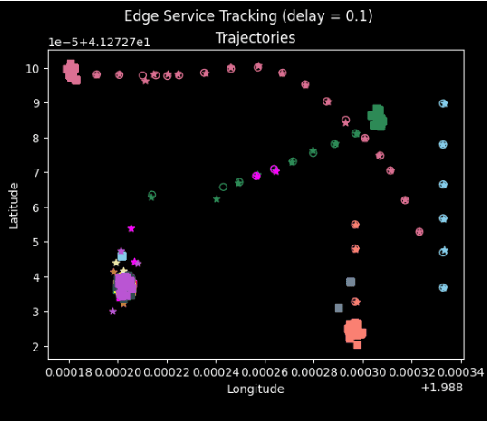
This paper deals with the multi-object detection and tracking problem, within the scope of open Radio Access Network (RAN), for collision avoidance in vehicular scenarios. To this end, a set of distributed intelligent agents collocated with cameras are considered. The fusion of detected objects is done at an edge service, considering Open RAN connectivity. Then, the edge service predicts the objects trajectories for collision avoidance. Compared to the related work a more realistic Open RAN network is implemented and multiple cameras are used.
View paper on