 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLDX-1 Technical Report
May 05, 2026While Vision-Language-Action models (VLAs) have shown remarkable progress toward human-like generalist robotic policies through the versatile intelligence (i.e. broad scene understanding and language-conditioned generalization) inherited from pre-trained Vision-Language Models, they still struggle with complex real-world tasks requiring broader functional capabilities (e.g. motion awareness, memory-aware decision making, and physical sensing). To address this, we introduce RLDX-1, a general-purpose robotic policy for dexterous manipulation built on the Multi-Stream Action Transformer (MSAT), an architecture that unifies these capabilities by integrating heterogeneous modalities through modality-specific streams with cross-modal joint self-attention. RLDX-1 further combines this architecture with system-level design choices, including synthesizing training data for rare manipulation scenarios, learning procedures specialized for human-like manipulation, and inference optimizations for real-time deployment. Through empirical evaluation, we show that RLDX-1 consistently outperforms recent frontier VLAs (e.g. $π_{0.5}$ and GR00T N1.6) across both simulation benchmarks and real-world tasks that require broad functional capabilities beyond general versatility. In particular, RLDX-1 shows superiority in ALLEX humanoid tasks by achieving success rates of 86.8% while $π_{0.5}$ and GR00T N1.6 achieve around 40%, highlighting the ability of RLDX-1 to control a high-DoF humanoid robot under diverse functional demands. Together, these results position RLDX-1 as a promising step toward reliable VLAs for complex, contact-rich, and dynamic real-world dexterous manipulation.
Vision-based Autonomous Driving for Unstructured Environments Using Imitation Learning
Feb 21, 2022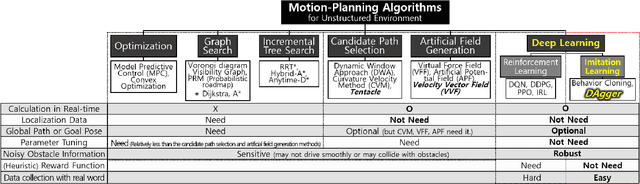
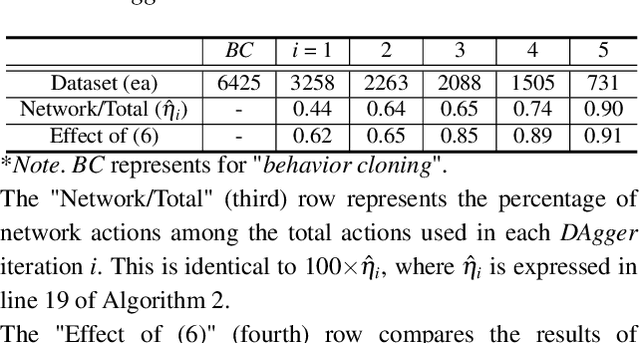
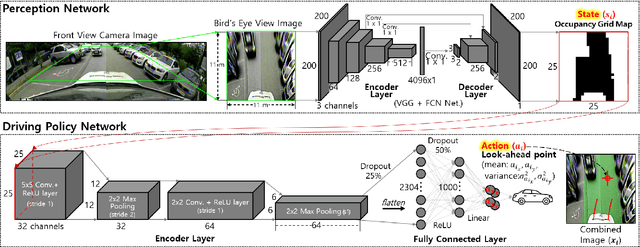

Unstructured environments are difficult for autonomous driving. This is because various unknown obstacles are lied in drivable space without lanes, and its width and curvature change widely. In such complex environments, searching for a path in real-time is difficult. Also, inaccurate localization data reduce the path tracking accuracy, increasing the risk of collision. Instead of searching and tracking the path, an alternative approach has been proposed that reactively avoids obstacles in real-time. Some methods are available for tracking global path while avoiding obstacles using the candidate paths and the artificial potential field. However, these methods require heuristics to find specific parameters for handling various complex environments. In addition, it is difficult to track the global path accurately in practice because of inaccurate localization data. If the drivable space is not accurately recognized (i.e., noisy state), the vehicle may not smoothly drive or may collide with obstacles. In this study, a method in which the vehicle drives toward drivable space only using a vision-based occupancy grid map is proposed. The proposed method uses imitation learning, where a deep neural network is trained with expert driving data. The network can learn driving patterns suited for various complex and noisy situations because these situations are contained in the training data. Experiments with a vehicle in actual parking lots demonstrated the limitations of general model-based methods and the effectiveness of the proposed imitation learning method.
Continuous-Curvature Target Tree Algorithm for Path Planning in Complex Parking Environments
Jan 19, 2022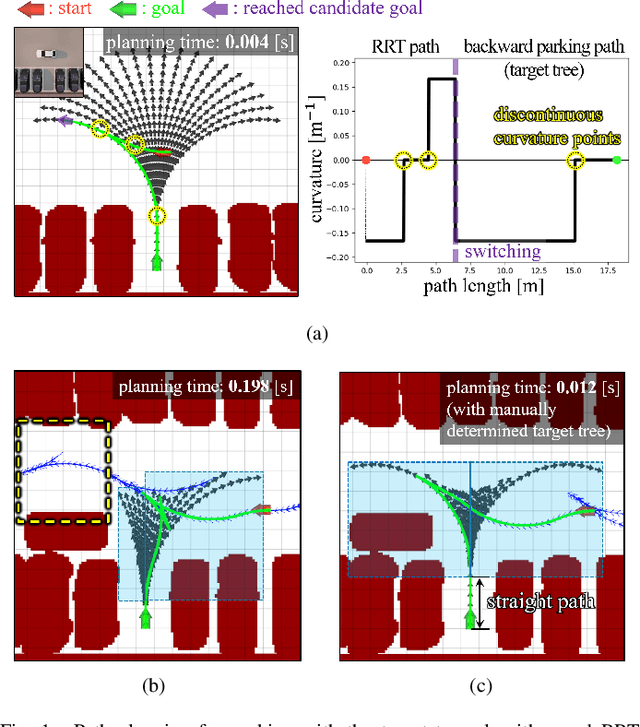
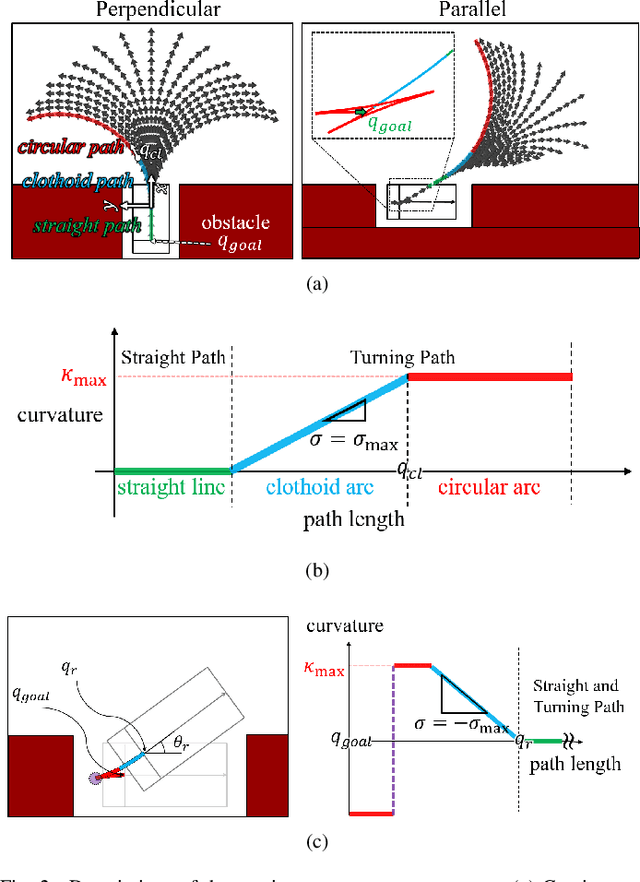
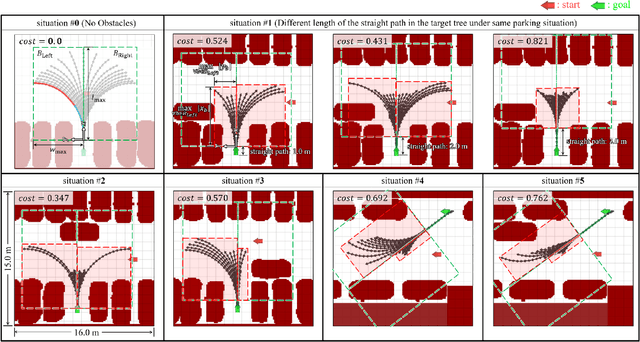
Rapidly-exploring random tree (RRT) has been applied for autonomous parking due to quickly solving high-dimensional motion planning and easily reflecting constraints. However, planning time increases by the low probability of extending toward narrow parking spots without collisions. To reduce the planning time, the target tree algorithm was proposed, substituting a parking goal in RRT with a set (target tree) of backward parking paths. However, it consists of circular and straight paths, and an autonomous vehicle cannot park accurately because of curvature-discontinuity. Moreover, the planning time increases in complex environments; backward paths can be blocked by obstacles. Therefore, this paper introduces the continuous-curvature target tree algorithm for complex parking environments. First, a target tree includes clothoid paths to address such curvature-discontinuity. Second, to reduce the planning time further, a cost function is defined to construct a target tree that considers obstacles. Integrated with optimal-variant RRT and searching for the shortest path among the reached backward paths, the proposed algorithm obtains a near-optimal path as the sampling time increases. Experiment results in real environments show that the vehicle more accurately parks, and continuous-curvature paths are obtained more quickly and with higher success rates than those acquired with other sampling-based algorithms.