 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDimensionality Reduction of Movement Primitives in Parameter Space
Feb 26, 2020

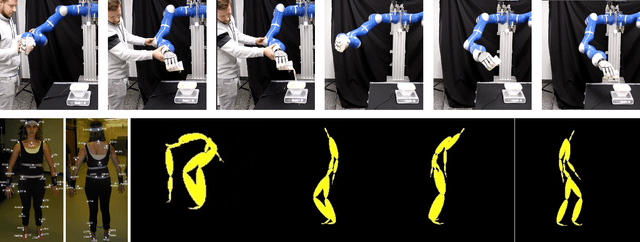

Movement primitives are an important policy class for real-world robotics. However, the high dimensionality of their parametrization makes the policy optimization expensive both in terms of samples and computation. Enabling an efficient representation of movement primitives facilitates the application of machine learning techniques such as reinforcement on robotics. Motions, especially in highly redundant kinematic structures, exhibit high correlation in the configuration space. For these reasons, prior work has mainly focused on the application of dimensionality reduction techniques in the configuration space. In this paper, we investigate the application of dimensionality reduction in the parameter space, identifying principal movements. The resulting approach is enriched with a probabilistic treatment of the parameters, inheriting all the properties of the Probabilistic Movement Primitives. We test the proposed technique both on a real robotic task and on a database of complex human movements. The empirical analysis shows that the dimensionality reduction in parameter space is more effective than in configuration space, as it enables the representation of the movements with a significant reduction of parameters.