 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning and Control for Deformable Linear Object Manipulation
Mar 06, 2025Manipulating a deformable linear object (DLO) such as wire, cable, and rope is a common yet challenging task due to their high degrees of freedom and complex deformation behaviors, especially in an environment with obstacles. Existing local control methods are efficient but prone to failure in complex scenarios, while precise global planners are computationally intensive and difficult to deploy. This paper presents an efficient, easy-to-deploy framework for collision-free DLO manipulation using mobile manipulators. We demonstrate the effectiveness of leveraging standard planning tools for high-dimensional DLO manipulation without requiring custom planners or extensive data-driven models. Our approach combines an off-the-shelf global planner with a real-time local controller. The global planner approximates the DLO as a series of rigid links connected by spherical joints, enabling rapid path planning without the need for problem-specific planners or large datasets. The local controller employs control barrier functions (CBFs) to enforce safety constraints, maintain the DLO integrity, prevent overstress, and handle obstacle avoidance. It compensates for modeling inaccuracies by using a state-of-the-art position-based dynamics technique that approximates physical properties like Young's and shear moduli. We validate our framework through extensive simulations and real-world demonstrations. In complex obstacle scenarios-including tent pole transport, corridor navigation, and tasks requiring varied stiffness-our method achieves a 100% success rate over thousands of trials, with significantly reduced planning times compared to state-of-the-art techniques. Real-world experiments include transportation of a tent pole and a rope using mobile manipulators. We share our ROS-based implementation to facilitate adoption in various applications.
Data-driven imaging geometric recovery of ultrahigh resolution robotic micro-CT for in-vivo and other applications
Jun 26, 2024

We introduce an ultrahigh-resolution (50\mu m\) robotic micro-CT design for localized imaging of carotid plaques using robotic arms, cutting-edge detector, and machine learning technologies. To combat geometric error-induced artifacts in interior CT scans, we propose a data-driven geometry estimation method that maximizes the consistency between projection data and the reprojection counterparts of a reconstructed volume. Particularly, we use a normalized cross correlation metric to overcome the projection truncation effect. Our approach is validated on a robotic CT scan of a sacrificed mouse and a micro-CT phantom scan, both producing sharper images with finer details than that prior correction.
Collaborative Manipulation of Deformable Objects with Predictive Obstacle Avoidance
Jan 29, 2024Manipulating deformable objects arises in daily life and numerous applications. Despite phenomenal advances in industrial robotics, manipulation of deformable objects remains mostly a manual task. This is because of the high number of internal degrees of freedom and the complexity of predicting its motion. In this paper, we apply the computationally efficient position-based dynamics method to predict object motion and distance to obstacles. This distance is incorporated in a control barrier function for the resolved motion kinematic control for one or more robots to adjust their motion to avoid colliding with the obstacles. The controller has been applied in simulations to 1D and 2D deformable objects with varying numbers of assistant agents, demonstrating its versatility across different object types and multi-agent systems. Results indicate the feasibility of real-time collision avoidance through deformable object simulation, minimizing path tracking error while maintaining a predefined minimum distance from obstacles and preventing overstretching of the deformable object. The implementation is performed in ROS, allowing ready portability to different applications.
Adaptive Neural Trajectory Tracking Control for Flexible-Joint Robots with Online Learning
Mar 11, 2020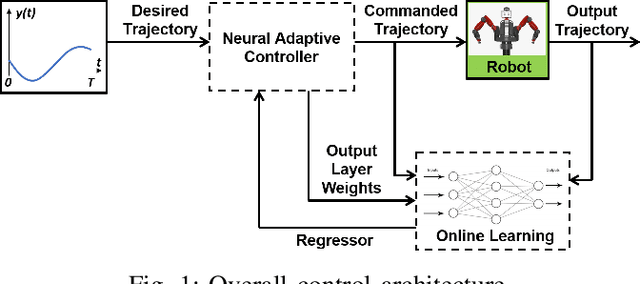
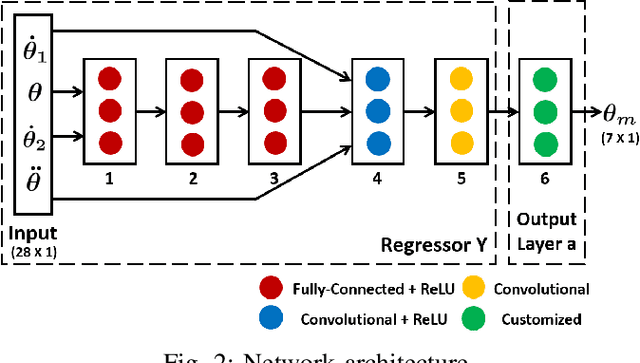
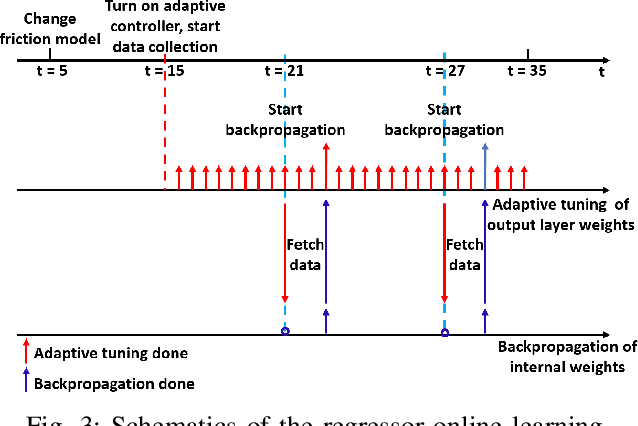

Collaborative robots and space manipulators contain significant joint flexibility. It complicates the control design, compromises the control bandwidth, and limits the tracking accuracy. The imprecise knowledge of the flexible joint dynamics compounds the challenge. In this paper, we present a new control architecture for controlling flexible-joint robots. Our approach uses a multi-layer neural network to approximate unknown dynamics needed for the feedforward control. The network may be viewed as a linear-in-parameter representation of the robot dynamics, with the nonlinear basis of the robot dynamics connected to the linear output layer. The output layer weights are updated based on the tracking error and the nonlinear basis. The internal weights of the nonlinear basis are updated by online backpropagation to further reduce the tracking error. To use time scale separation to reduce the coupling of the two steps - the update of the internal weights is at a lower rate compared to the update of the output layer weights. With the update of the output layer weights, our controller adapts quickly to the unknown dynamics change and disturbances (such as attaching a load). The update of the internal weights would continue to improve the converge of the nonlinear basis functions. We show the stability of the proposed scheme under the "outer loop" control, where the commanded joint position is considered as the control input. Simulation and physical experiments are conducted to demonstrate the performance of the proposed controller on a Baxter robot, which exhibits significant joint flexibility due to the series-elastic joint actuators.