 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContingency Model Predictive Control for Linear Time-Varying Systems
Feb 27, 2021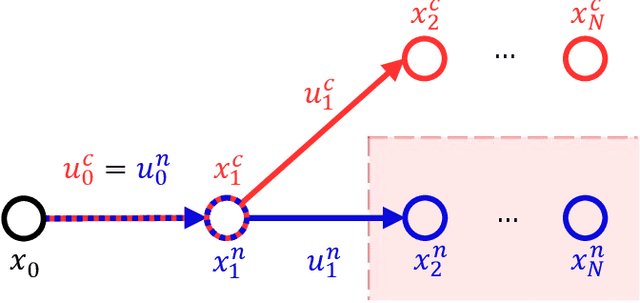
We present Contingency Model Predictive Control (CMPC), a motion planning and control framework that optimizes performance objectives while simultaneously maintaining a contingency plan -- an alternate trajectory that avoids a potential hazard. By preserving the existence of a feasible avoidance trajectory, CMPC anticipates emergency and keeps the controlled system in a safe state that is selectively robust to the identified hazard. We accomplish this by adding an additional prediction horizon in parallel to the typical Model Predictive Control (MPC) horizon. This extra horizon is constrained to guarantee safety from the contingent threat and is coupled to the nominal horizon at its first command. Thus, the two horizons negotiate to compute commands that are both optimized for performance and robust to the contingent event. This article presents a linear formulation for CMPC, illustrates its key features on a toy problem, and then demonstrates its efficacy experimentally on a full-size automated road vehicle that encounters a realistic pop-out obstacle. Contingency MPC approaches potential emergencies with safe, intuitive, and interpretable behavior that balances conservatism with incentive for high performance operation.
Contingency Model Predictive Control for Automated Vehicles
Mar 21, 2019
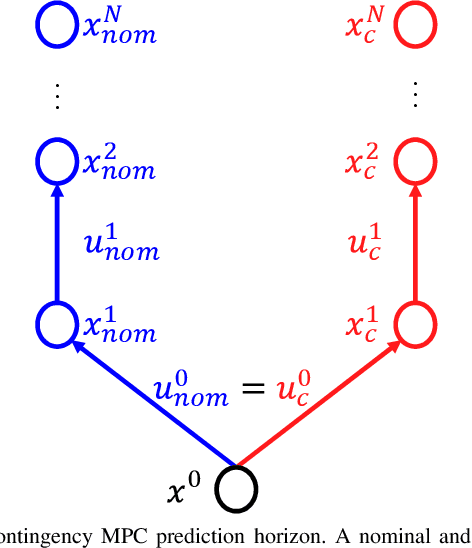
We present Contingency Model Predictive Control (CMPC), a novel and implementable control framework which tracks a desired path while simultaneously maintaining a contingency plan -- an alternate trajectory to avert an identified potential emergency. In this way, CMPC anticipates events that might take place, instead of reacting when emergencies occur. We accomplish this by adding an additional prediction horizon in parallel to the classical receding MPC horizon. The contingency horizon is constrained to maintain a feasible avoidance solution; as such, CMPC is selectively robust to this emergency while tracking the desired path as closely as possible. After defining the framework mathematically, we demonstrate its effectiveness experimentally by comparing its performance to a state-of-the-art deterministic MPC. The controllers drive an automated research platform through a left-hand turn which may be covered by ice. Contingency MPC prepares for the potential loss of friction by purposefully and intuitively deviating from the prescribed path to approach the turn more conservatively; this deviation significantly mitigates the consequence of encountering ice.