 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordinating Spinal and Limb Dynamics for Enhanced Sprawling Robot Mobility
Apr 18, 2025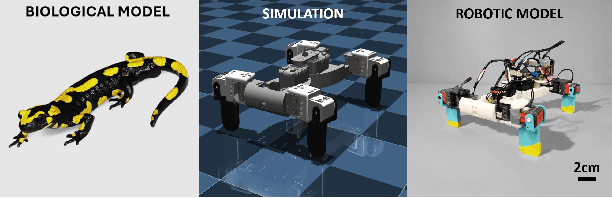

Among vertebrates, salamanders, with their unique ability to transition between walking and swimming gaits, highlight the role of spinal mobility in locomotion. A flexible spine enables undulation of the body through a wavelike motion along the spine, aiding navigation over uneven terrains and obstacles. Yet environmental uncertainties, such as surface irregularities and variations in friction, can significantly disrupt body-limb coordination and cause discrepancies between predictions from mathematical models and real-world outcomes. Addressing this challenge requires the development of sophisticated control strategies capable of dynamically adapting to uncertain conditions while maintaining efficient locomotion. Deep reinforcement learning (DRL) offers a promising framework for handling non-deterministic environments and enabling robotic systems to adapt effectively and perform robustly under challenging conditions. In this study, we comparatively examine learning-based control strategies and biologically inspired gait design methods on a salamander-like robot.