 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Constraint Formulation and Collision-Free Trajectory Planning Using Space-Time Graphs of Convex Sets
Aug 13, 2025In this paper, we create optimal, collision-free, time-dependent trajectories through cluttered dynamic environments. The many spatial and temporal constraints make finding an initial guess for a numerical solver difficult. Graphs of Convex Sets (GCS) and the recently developed Space-Time Graphs of Convex Sets formulation (ST-GCS) enable us to generate optimal minimum distance collision-free trajectories without providing an initial guess to the solver. We also explore the derivation of general GCS-compatible constraints and document an intuitive strategy for adapting general constraints to the framework. We show that ST-GCS produces equivalent trajectories to the standard GCS formulation when the environment is static. We then show ST-GCS operating in dynamic environments to find minimum distance collision-free trajectories.
Leveraging Passive Compliance of Soft Robotics for Physical Human-Robot Collaborative Manipulation
Apr 11, 2025This work represents an initial benchmark of a large-scale soft robot performing physical, collaborative manipulation of a long, extended object with a human partner. The robot consists of a pneumatically-actuated, three-link continuum soft manipulator mounted to an omni-directional mobile base. The system level configuration of the robot and design of the collaborative manipulation (co-manipulation) study are presented. The initial results, both quantitative and qualitative, are directly compared to previous similar human-human co-manipulation studies. These initial results show promise in the ability for large-scale soft robots to perform comparably to human partners acting as non-visual followers in a co-manipulation task. Furthermore, these results challenge traditional soft robot strength limitations and indicate potential for applications requiring strength and adaptability.
A Decomposition of Interaction Force for Multi-Agent Co-Manipulation
Aug 02, 2024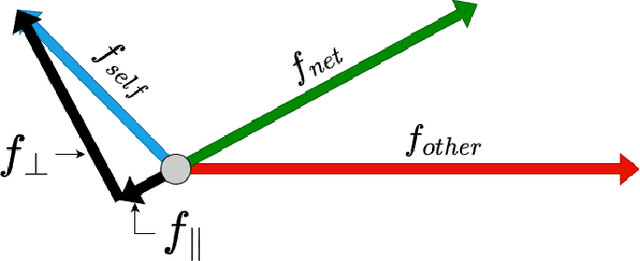
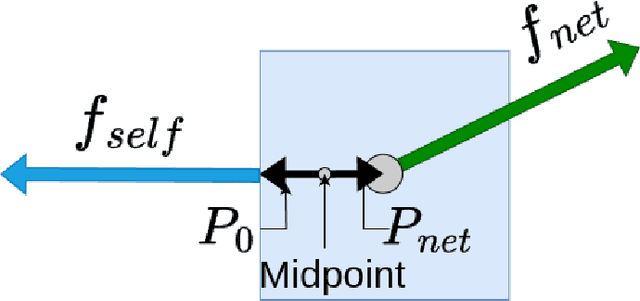
Multi-agent human-robot co-manipulation is a poorly understood process with many inputs that potentially affect agent behavior. This paper explores one such input known as interaction force. Interaction force is potentially a primary component in communication that occurs during co-manipulation. There are, however, many different perspectives and definitions of interaction force in the literature. Therefore, a decomposition of interaction force is proposed that provides a consistent way of ascertaining the state of an agent relative to the group for multi-agent co-manipulation. This proposed method extends a current definition from one to four degrees of freedom, does not rely on a predefined object path, and is independent of the number of agents acting on the system and their locations and input wrenches (forces and torques). In addition, all of the necessary measures can be obtained by a self-contained robotic system, allowing for a more flexible and adaptive approach for future co-manipulation robot controllers.