 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Passive Compliance of Soft Robotics for Physical Human-Robot Collaborative Manipulation
Apr 11, 2025This work represents an initial benchmark of a large-scale soft robot performing physical, collaborative manipulation of a long, extended object with a human partner. The robot consists of a pneumatically-actuated, three-link continuum soft manipulator mounted to an omni-directional mobile base. The system level configuration of the robot and design of the collaborative manipulation (co-manipulation) study are presented. The initial results, both quantitative and qualitative, are directly compared to previous similar human-human co-manipulation studies. These initial results show promise in the ability for large-scale soft robots to perform comparably to human partners acting as non-visual followers in a co-manipulation task. Furthermore, these results challenge traditional soft robot strength limitations and indicate potential for applications requiring strength and adaptability.
PneuDrive: An Embedded Pressure Control System and Modeling Toolkit for Large-Scale Soft Robots
Mar 31, 2025In this paper, we present a modular pressure control system called PneuDrive that can be used for large-scale, pneumatically-actuated soft robots. The design is particularly suited for situations which require distributed pressure control and high flow rates. Up to four embedded pressure control modules can be daisy-chained together as peripherals on a robust RS-485 bus, enabling closed-loop control of up to 16 valves with pressures ranging from 0-100 psig (0-689 kPa) over distances of more than 10 meters. The system is configured as a C++ ROS node by default. However, independent of ROS, we provide a Python interface with a scripting API for added flexibility. We demonstrate our implementation of PneuDrive through various trajectory tracking experiments for a three-joint, continuum soft robot with 12 different pressure inputs. Finally, we present a modeling toolkit with implementations of three dynamic actuation models, all suitable for real-time simulation and control. We demonstrate the use of this toolkit in customizing each model with real-world data and evaluating the performance of each model. The results serve as a reference guide for choosing between several actuation models in a principled manner. A video summarizing our results can be found here: https://bit.ly/3QkrEqO.
* Proceedings of the 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft)
A Decomposition of Interaction Force for Multi-Agent Co-Manipulation
Aug 02, 2024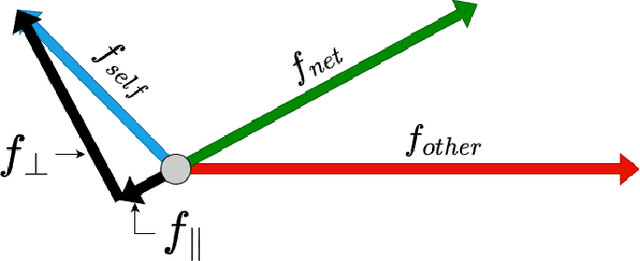
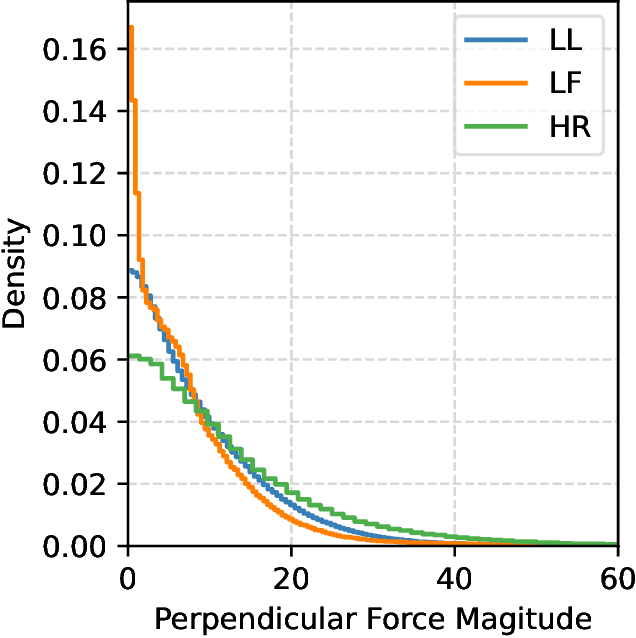
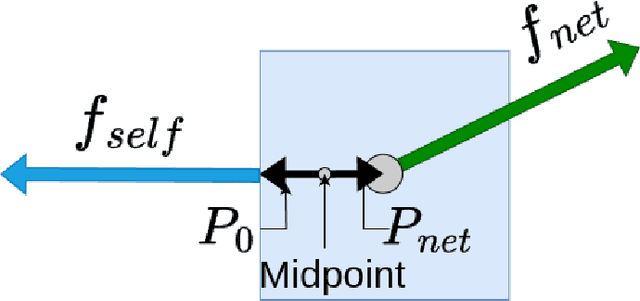
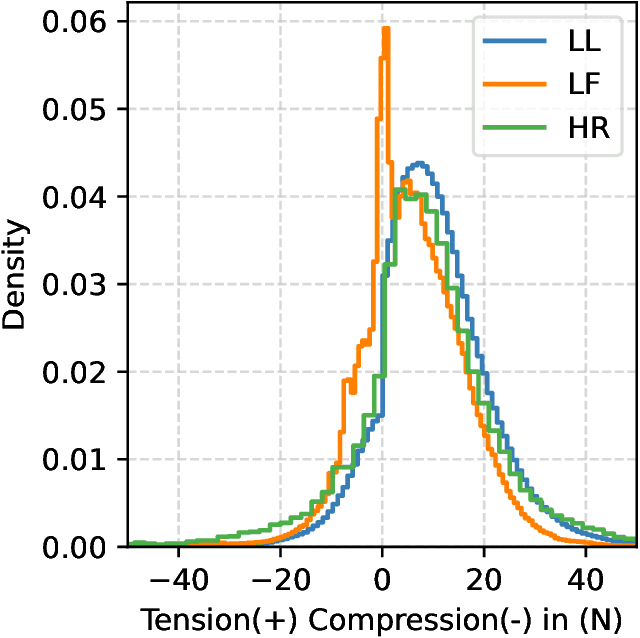
Multi-agent human-robot co-manipulation is a poorly understood process with many inputs that potentially affect agent behavior. This paper explores one such input known as interaction force. Interaction force is potentially a primary component in communication that occurs during co-manipulation. There are, however, many different perspectives and definitions of interaction force in the literature. Therefore, a decomposition of interaction force is proposed that provides a consistent way of ascertaining the state of an agent relative to the group for multi-agent co-manipulation. This proposed method extends a current definition from one to four degrees of freedom, does not rely on a predefined object path, and is independent of the number of agents acting on the system and their locations and input wrenches (forces and torques). In addition, all of the necessary measures can be obtained by a self-contained robotic system, allowing for a more flexible and adaptive approach for future co-manipulation robot controllers.