 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Reality for Human-Swarm Interaction in a Swarm-Robotic Chemistry Simulation
Dec 02, 2019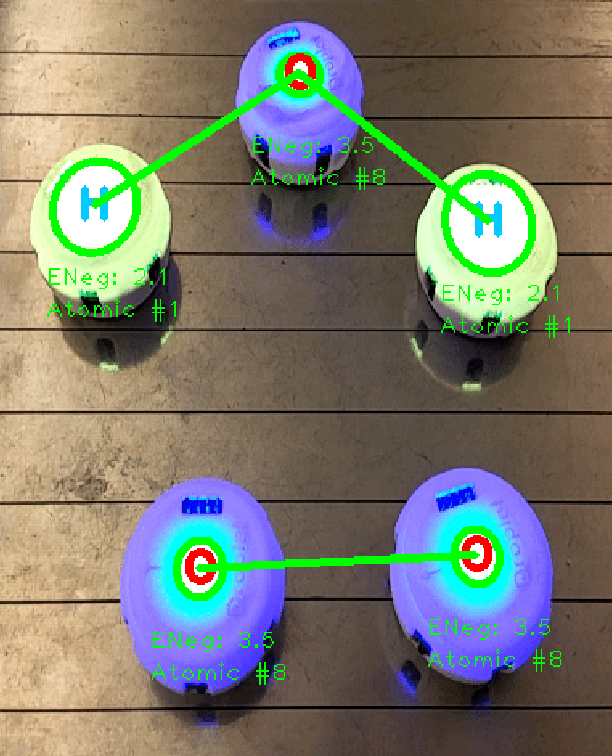


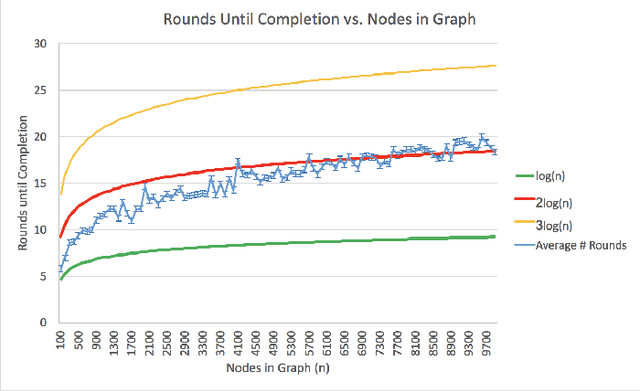
We present a method to register individual members of a robotic swarm in an augmented reality display while showing relevant information about swarm dynamics to the user that would be otherwise hidden. Individual swarm members and clusters of the same group are identified by their color, and by blinking at a specific time interval that is distinct from the time interval at which their neighbors blink. We show that this problem is an instance of the graph coloring problem, which can be solved in a distributed manner in O(log(n)) time. We demonstrate our approach using a swarm chemistry simulation in which robots simulate individual atoms that form molecules following the rules of chemistry. Augmented reality is then used to display information about the internal state of individual swarm members as well as their topological relationship, corresponding to molecular bonds.
Distributed Camouflage for Swarm Robotics and Smart Materials
Sep 20, 2017



We present a distributed algorithm for a swarm of active particles to camouflage in an environment. Each particle is equipped with sensing, computation and communication, allowing the system to take color and gradient information from the environment and self-organize into an appropriate pattern. Current artificial camouflage systems are either limited to static patterns, which are adapted for specific environments, or rely on back-projection, which depend on the viewer's point of view. Inspired by the camouflage abilities of the cuttlefish, we propose a distributed estimation and pattern formation algorithm that allows to quickly adapt to different environments. We present convergence results both in simulation as well as on a swarm of miniature robots "Droplets" for a variety of patterns.