 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Lunar Terrain: A Multimodal Open Dataset for Training and Evaluating Neuromorphic Vision Algorithms
Aug 30, 2024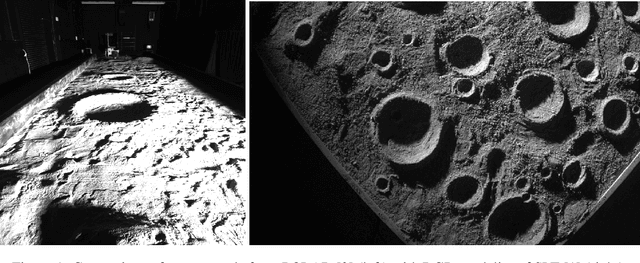
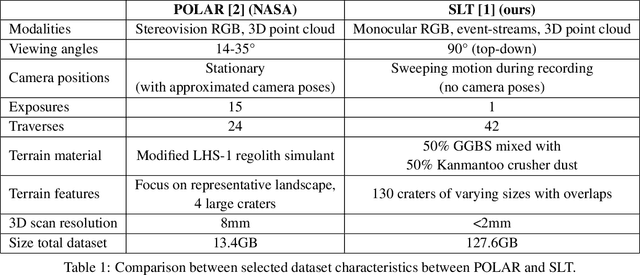
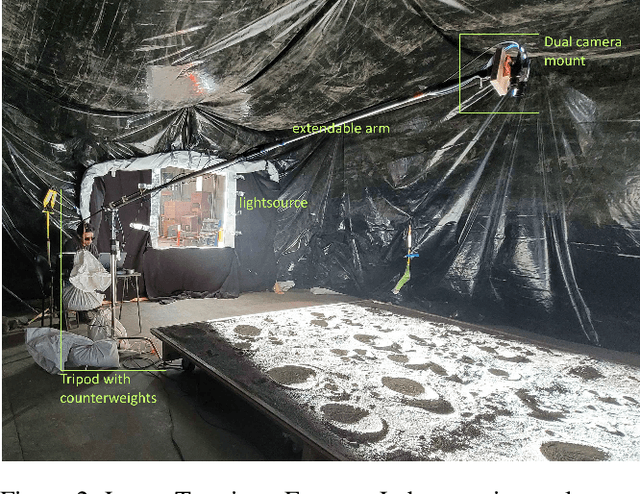
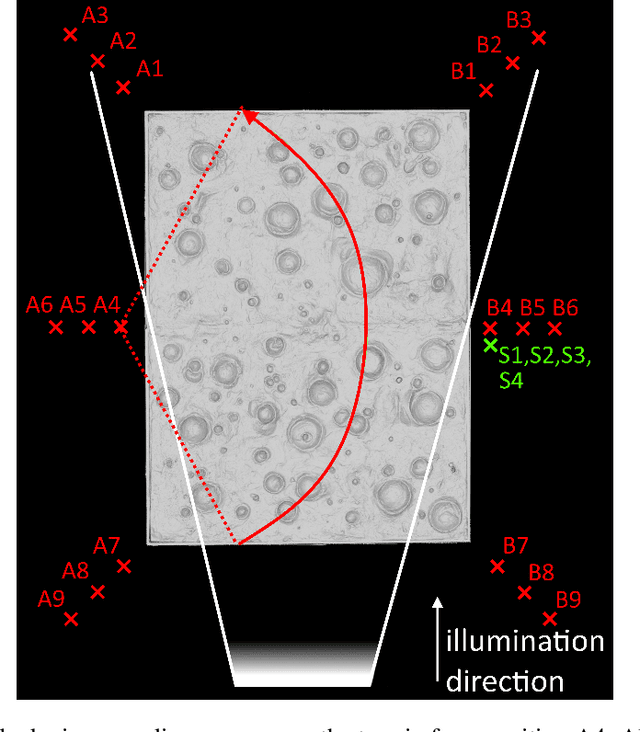
Synthetic Lunar Terrain (SLT) is an open dataset collected from an analogue test site for lunar missions, featuring synthetic craters in a high-contrast lighting setup. It includes several side-by-side captures from event-based and conventional RGB cameras, supplemented with a high-resolution 3D laser scan for depth estimation. The event-stream recorded from the neuromorphic vision sensor of the event-based camera is of particular interest as this emerging technology provides several unique advantages, such as high data rates, low energy consumption and resilience towards scenes of high dynamic range. SLT provides a solid foundation to analyse the limits of RGB-cameras and potential advantages or synergies in utilizing neuromorphic visions with the goal of enabling and improving lunar specific applications like rover navigation, landing in cratered environments or similar.