 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Meta-learning for AutoML in Real-time (OnMAR)
Feb 27, 2025Automated machine learning (AutoML) is a research area focusing on using optimisation techniques to design machine learning (ML) algorithms, alleviating the need for a human to perform manual algorithm design. Real-time AutoML enables the design process to happen while the ML algorithm is being applied to a task. Real-time AutoML is an emerging research area, as such existing real-time AutoML techniques need improvement with respect to the quality of designs and time taken to create designs. To address these issues, this study proposes an Online Meta-learning for AutoML in Real-time (OnMAR) approach. Meta-learning gathers information about the optimisation process undertaken by the ML algorithm in the form of meta-features. Meta-features are used in conjunction with a meta-learner to optimise the optimisation process. The OnMAR approach uses a meta-learner to predict the accuracy of an ML design. If the accuracy predicted by the meta-learner is sufficient, the design is used, and if the predicted accuracy is low, an optimisation technique creates a new design. A genetic algorithm (GA) is the optimisation technique used as part of the OnMAR approach. Different meta-learners (k-nearest neighbours, random forest and XGBoost) are tested. The OnMAR approach is model-agnostic (i.e. not specific to a single real-time AutoML application) and therefore evaluated on three different real-time AutoML applications, namely: composing an image clustering algorithm, configuring the hyper-parameters of a convolutional neural network, and configuring a video classification pipeline. The OnMAR approach is effective, matching or outperforming existing real-time AutoML approaches, with the added benefit of a faster runtime.
Interacting Multiple Model-based Joint Homography Matrix and Multiple Object State Estimation
Sep 04, 2024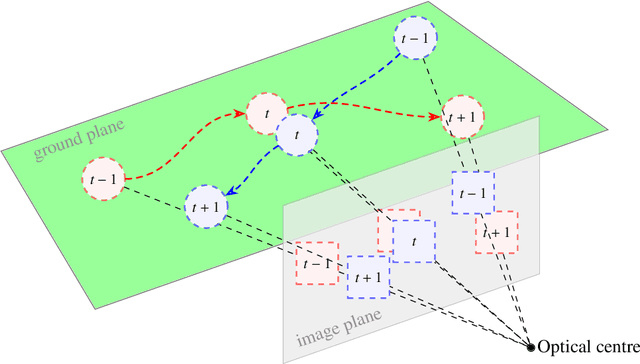
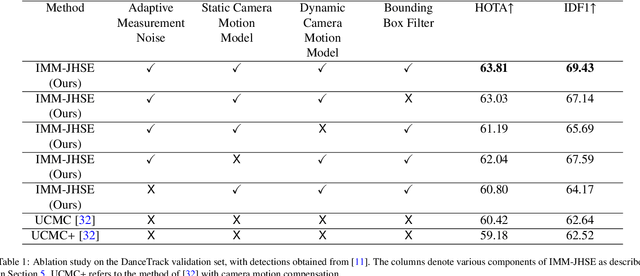
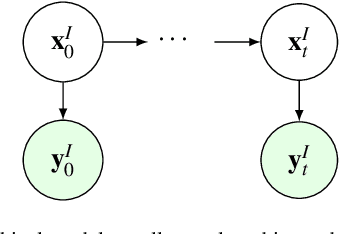
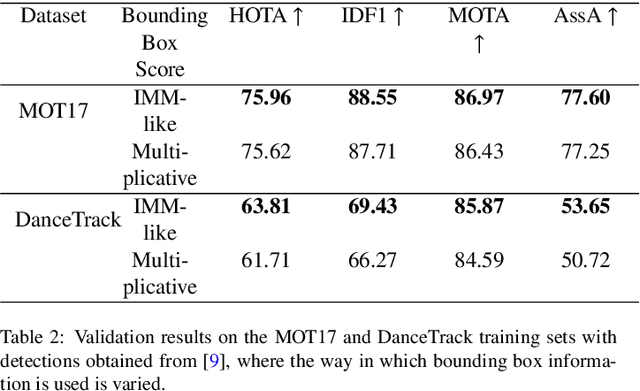
A novel MOT algorithm, IMM Joint Homography State Estimation (IMM-JHSE), is proposed. By jointly modelling the camera projection matrix as part of track state vectors, IMM-JHSE removes the explicit influence of camera motion compensation techniques on predicted track position states, which was prevalent in previous approaches. Expanding upon this, static and dynamic camera motion models are combined through the use of an IMM filter. A simple bounding box motion model is used to predict bounding box positions to incorporate image plane information. In addition to applying an IMM to camera motion, a non-standard IMM approach is applied where bounding-box-based BIoU scores are mixed with ground-plane-based Mahalanobis distances in an IMM-like fashion to perform association only. Finally, IMM-JHSE makes use of dynamic process and measurement noise estimation techniques. IMM-JHSE improves upon related techniques on the DanceTrack and KITTI-car datasets, increasing HOTA by 2.64 and 2.11, respectively, while offering competitive performance on the MOT17, MOT20 and KITTI-pedestrian datasets.
Deep Learning and Statistical Models for Time-Critical Pedestrian Behaviour Prediction
Feb 26, 2020
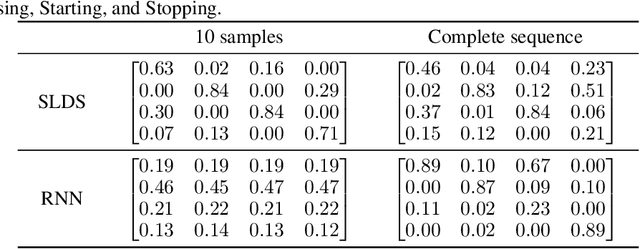
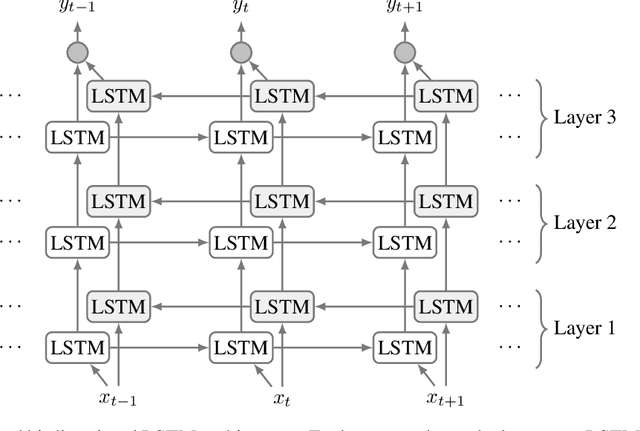

The time it takes for a classifier to make an accurate prediction can be crucial in many behaviour recognition problems. For example, an autonomous vehicle should detect hazardous pedestrian behaviour early enough for it to take appropriate measures. In this context, we compare the switching linear dynamical system (SLDS) and a three-layered bi-directional long short-term memory (LSTM) neural network, which are applied to infer pedestrian behaviour from motion tracks. We show that, though the neural network model achieves an accuracy of 80%, it requires long sequences to achieve this (100 samples or more). The SLDS, has a lower accuracy of 74%, but it achieves this result with short sequences (10 samples). To our knowledge, such a comparison on sequence length has not been considered in the literature before. The results provide a key intuition of the suitability of the models in time-critical problems.