 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing Search Topology Without Running Any Search: On the Connection Between Causal Graphs and h+
Jan 16, 2014


The ignoring delete lists relaxation is of paramount importance for both satisficing and optimal planning. In earlier work, it was observed that the optimal relaxation heuristic h+ has amazing qualities in many classical planning benchmarks, in particular pertaining to the complete absence of local minima. The proofs of this are hand-made, raising the question whether such proofs can be lead automatically by domain analysis techniques. In contrast to earlier disappointing results -- the analysis method has exponential runtime and succeeds only in two extremely simple benchmark domains -- we herein answer this question in the affirmative. We establish connections between causal graph structure and h+ topology. This results in low-order polynomial time analysis methods, implemented in a tool we call TorchLight. Of the 12 domains where the absence of local minima has been proved, TorchLight gives strong success guarantees in 8 domains. Empirically, its analysis exhibits strong performance in a further 2 of these domains, plus in 4 more domains where local minima may exist but are rare. In this way, TorchLight can distinguish easy domains from hard ones. By summarizing structural reasons for analysis failure, TorchLight also provides diagnostic output indicating domain aspects that may cause local minima.
POMDPs Make Better Hackers: Accounting for Uncertainty in Penetration Testing
Jul 31, 2013
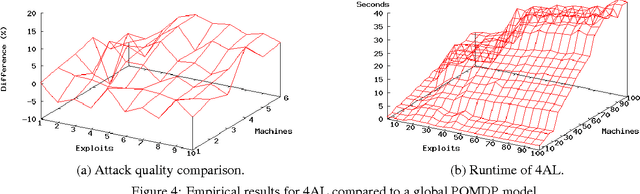
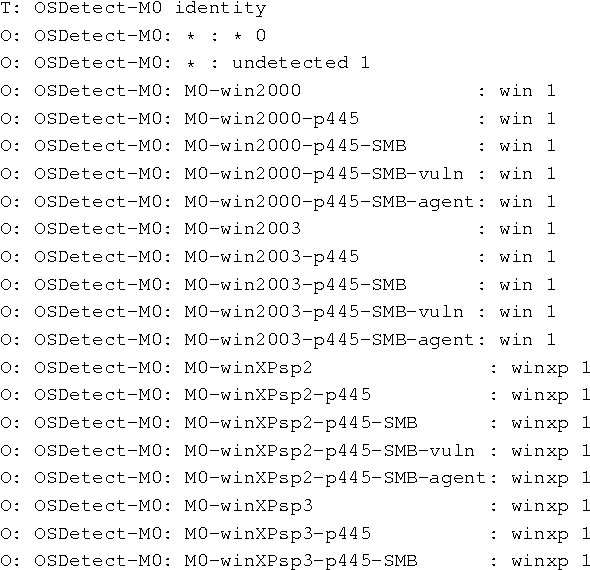
Penetration Testing is a methodology for assessing network security, by generating and executing possible hacking attacks. Doing so automatically allows for regular and systematic testing. A key question is how to generate the attacks. This is naturally formulated as planning under uncertainty, i.e., under incomplete knowledge about the network configuration. Previous work uses classical planning, and requires costly pre-processes reducing this uncertainty by extensive application of scanning methods. By contrast, we herein model the attack planning problem in terms of partially observable Markov decision processes (POMDP). This allows to reason about the knowledge available, and to intelligently employ scanning actions as part of the attack. As one would expect, this accurate solution does not scale. We devise a method that relies on POMDPs to find good attacks on individual machines, which are then composed into an attack on the network as a whole. This decomposition exploits network structure to the extent possible, making targeted approximations (only) where needed. Evaluating this method on a suitably adapted industrial test suite, we demonstrate its effectiveness in both runtime and solution quality.
* Twenty-Sixth Conference on Artificial Intelligence (AAAI-12), Toronto, Canada
Les POMDP font de meilleurs hackers: Tenir compte de l'incertitude dans les tests de penetration
Jul 30, 2013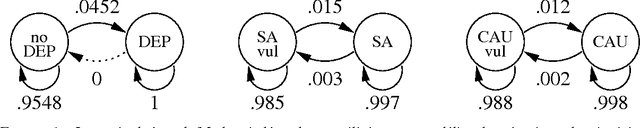



Penetration Testing is a methodology for assessing network security, by generating and executing possible hacking attacks. Doing so automatically allows for regular and systematic testing. A key question is how to generate the attacks. This is naturally formulated as planning under uncertainty, i.e., under incomplete knowledge about the network configuration. Previous work uses classical planning, and requires costly pre-processes reducing this uncertainty by extensive application of scanning methods. By contrast, we herein model the attack planning problem in terms of partially observable Markov decision processes (POMDP). This allows to reason about the knowledge available, and to intelligently employ scanning actions as part of the attack. As one would expect, this accurate solution does not scale. We devise a method that relies on POMDPs to find good attacks on individual machines, which are then composed into an attack on the network as a whole. This decomposition exploits network structure to the extent possible, making targeted approximations (only) where needed. Evaluating this method on a suitably adapted industrial test suite, we demonstrate its effectiveness in both runtime and solution quality.
Penetration Testing == POMDP Solving?
Jun 19, 2013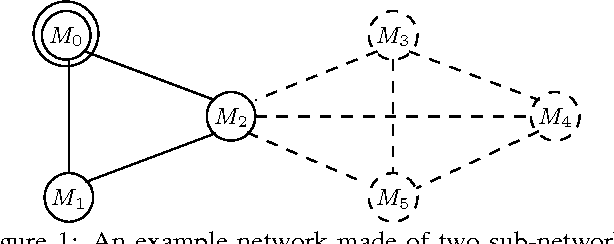


Penetration Testing is a methodology for assessing network security, by generating and executing possible attacks. Doing so automatically allows for regular and systematic testing without a prohibitive amount of human labor. A key question then is how to generate the attacks. This is naturally formulated as a planning problem. Previous work (Lucangeli et al. 2010) used classical planning and hence ignores all the incomplete knowledge that characterizes hacking. More recent work (Sarraute et al. 2011) makes strong independence assumptions for the sake of scaling, and lacks a clear formal concept of what the attack planning problem actually is. Herein, we model that problem in terms of partially observable Markov decision processes (POMDP). This grounds penetration testing in a well-researched formalism, highlighting important aspects of this problem's nature. POMDPs allow to model information gathering as an integral part of the problem, thus providing for the first time a means to intelligently mix scanning actions with actual exploits.
Structure and Problem Hardness: Goal Asymmetry and DPLL Proofs in<br> SAT-Based Planning
Feb 26, 2007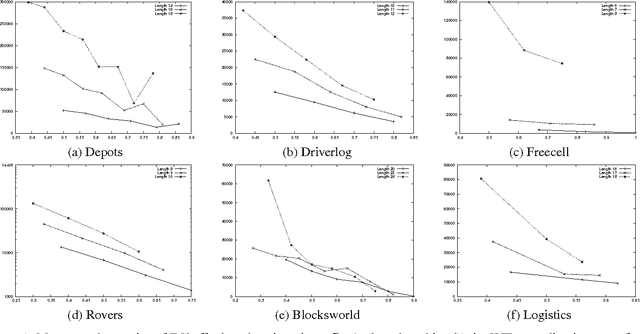



In Verification and in (optimal) AI Planning, a successful method is to formulate the application as boolean satisfiability (SAT), and solve it with state-of-the-art DPLL-based procedures. There is a lack of understanding of why this works so well. Focussing on the Planning context, we identify a form of problem structure concerned with the symmetrical or asymmetrical nature of the cost of achieving the individual planning goals. We quantify this sort of structure with a simple numeric parameter called AsymRatio, ranging between 0 and 1. We run experiments in 10 benchmark domains from the International Planning Competitions since 2000; we show that AsymRatio is a good indicator of SAT solver performance in 8 of these domains. We then examine carefully crafted synthetic planning domains that allow control of the amount of structure, and that are clean enough for a rigorous analysis of the combinatorial search space. The domains are parameterized by size, and by the amount of structure. The CNFs we examine are unsatisfiable, encoding one planning step less than the length of the optimal plan. We prove upper and lower bounds on the size of the best possible DPLL refutations, under different settings of the amount of structure, as a function of size. We also identify the best possible sets of branching variables (backdoors). With minimum AsymRatio, we prove exponential lower bounds, and identify minimal backdoors of size linear in the number of variables. With maximum AsymRatio, we identify logarithmic DPLL refutations (and backdoors), showing a doubly exponential gap between the two structural extreme cases. The reasons for this behavior -- the proof arguments -- illuminate the prototypical patterns of structure causing the empirical behavior observed in the competition benchmarks.